4. Kerbin周回軌道へ
前回までのロケットは打ち上げ中に制御は必要なく、操作と言えば順次スペースキーを押すだけでした。この打ち上げ方式ではロケットは地面に対して垂直に加速し、燃焼終了後に打ち上げ地点付近の地上に戻ってくるという飛行経路でした。
しかしこれからの飛行は惑星Kerbinの周回軌道に乗る事を目指しており、そのためには地面に対して水平方向への加速が必要となっています。しかしながらロケットは初期の段階では垂直に打ち上げる(=垂直に加速する)ため飛行中に加速方向を水平に変える操縦が必要となってきます。その上、水平方向へ十分加速する必要があるため、ロケットの規模も大きくなります。
よって、Kerbinの周回軌道に乗る事がゲーム序盤での大きな山場となります。
4.1 新たな契約の受注と新規パーツの開発(その2)
また新しく契約を受注します。今回受注するのは「カービン(Kerbin)の周回軌道に到達せよ!」です。
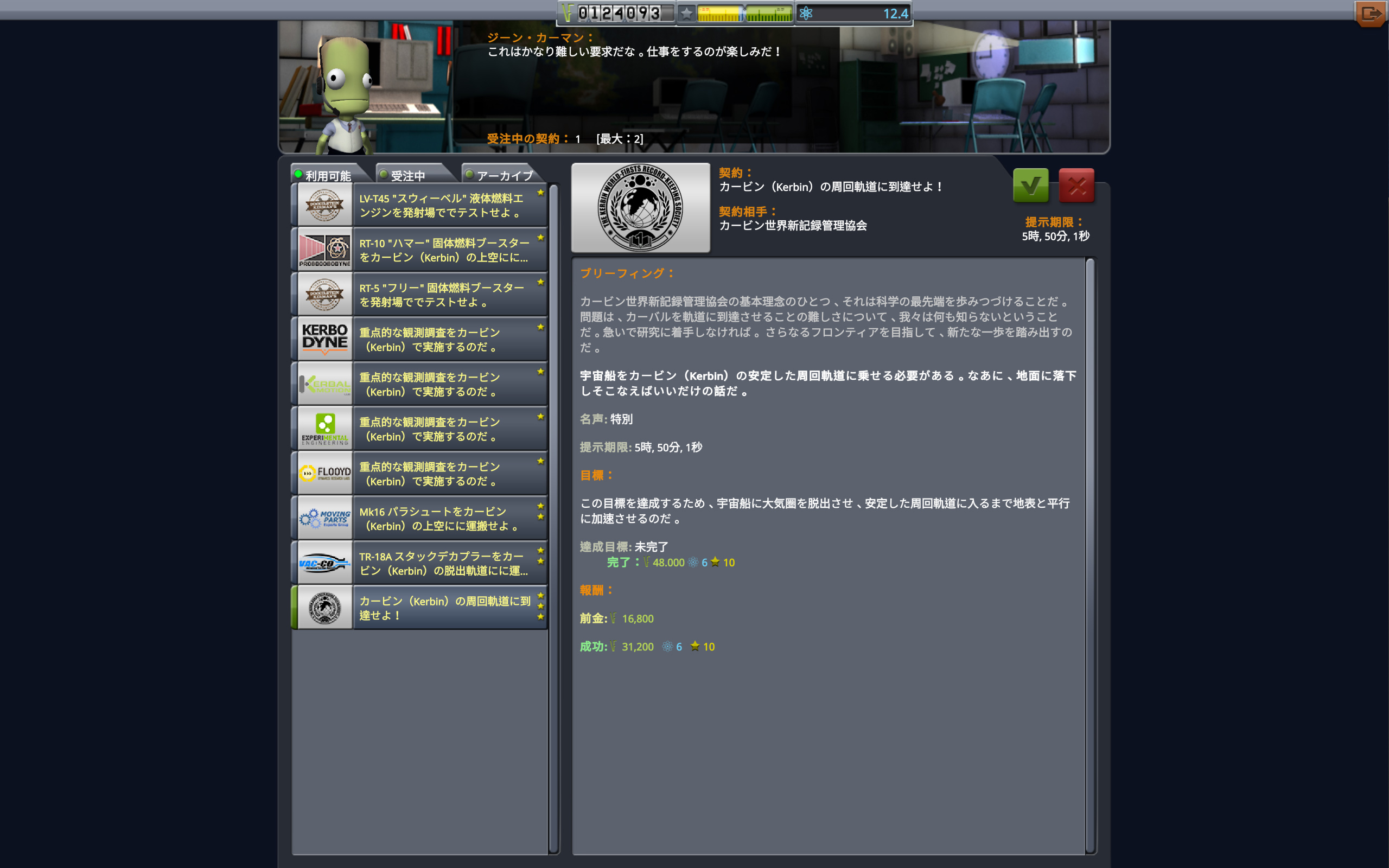
ミッション受注は忘れずに
次に研究開発センターでは「スタビリティ」と「一般ロケット工学」を研究します。スタビリティによって横方向に切り離せるデカプラーと安定翼が、一般ロケット工学で液体燃料ロケットエンジンが使用可能となります。
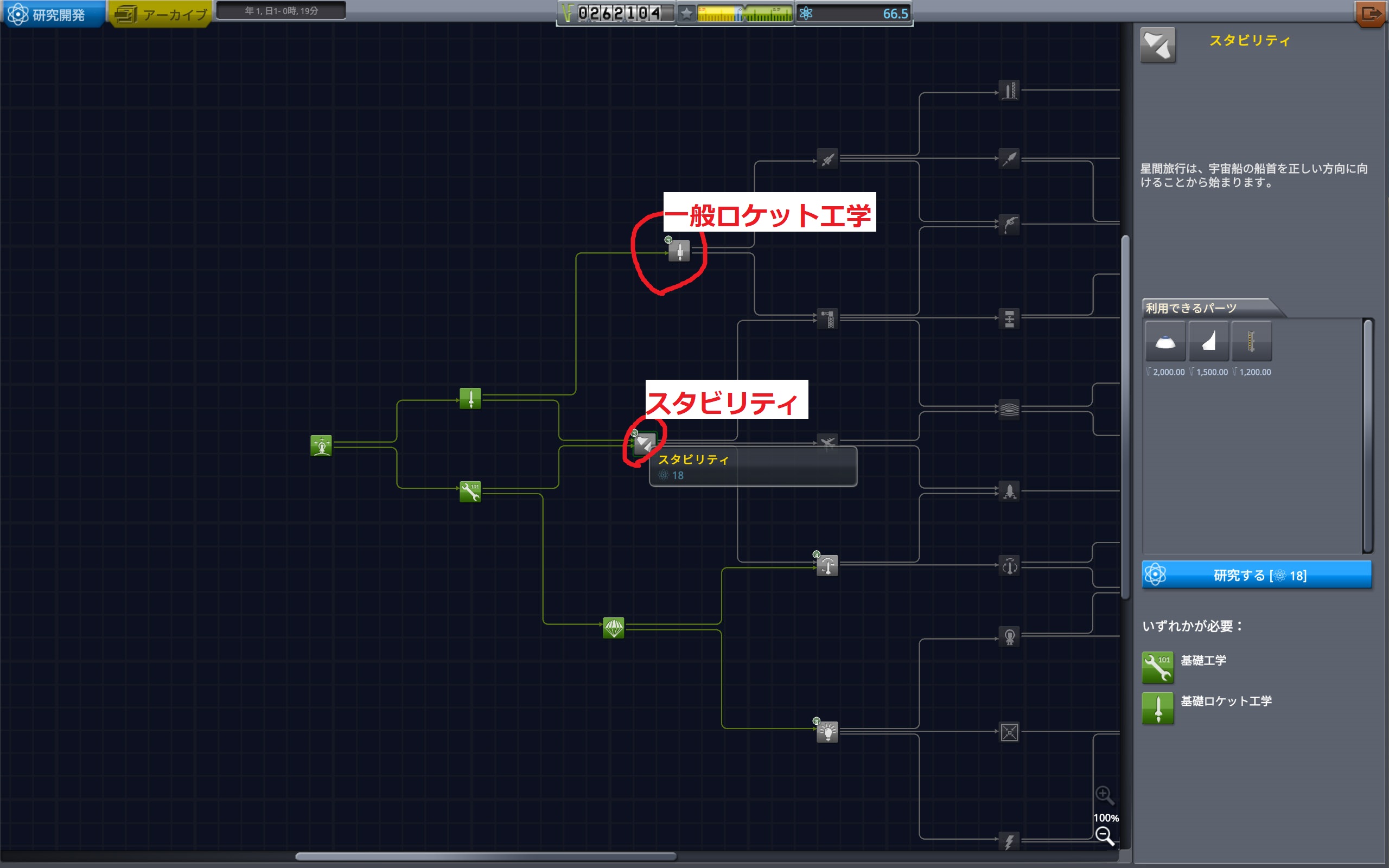
スタビリティと一般ロケット工学
4.2 周回軌道到達用ロケットの組み立て
本章冒頭で前述した通り、周回軌道に到達するためには今までの打ち上げと違いロケットの操縦が必要です。
これまで用いていた固体燃料ブースターは一度点火すると原則的に推力(出力)100%のまま燃え尽きるまで停止できない上に、
この段階で利用可能な固体燃料ブースターでは燃焼ガスの噴射方向を変える事が不可能なため、飛行中のロケットの向きを変更するのが困難です。
(現実世界では推力偏向可能な機種も多い。アメリカのスペースシャトル固体燃料補助ロケットや日本のSRB-Aなどはノズルが稼動する推力偏向機能が付いている。)
対して液体燃料エンジンは(KSPの世界では)推力が0~100%で自由に調節できる上に何回でも再点火が可能です。
その上噴射方向を変える事が可能なタイプの液体燃料エンジンを使用すると、飛行中の機体の向きを容易に変える事ができ、ロケットの進行方向を変更するのが容易です。固体燃料と比較した際の液体燃料エンジンの特徴をまとめると以下の通りとなります。
液体燃料エンジンの特徴
・同じ重量の固体燃料よりも高効率(=比推力が高い)
・飛行中の推力の調節、再点火が可能
・飛行中の機体を制御しやすくする(液体燃料エンジンの機種による)
液体燃料エンジンの欠点としては値段が高いという事があるのですがKSPの世界では劇的な差はなく、適切な設計をするとむしろ固体燃料ロケットよりも安くなる傾向があります。
*余談ではありますが、現実世界の液体燃料エンジンは推力の調節幅及び着火可能回数に制限があります。
例として日本の液体燃料エンジンであるLE-5Bの現行版だと、推力調節幅は60~100%、着火回数は「多回数」(3回以上)となっています。
それでは組立に入ります。
前回作成した「Kerbal-1」のカプセルに付いていたMk12-Rドラッグシュート(オレンジ色のパラシュート)をパーツカテゴリ「ユーティリティ」から「Mk2-Rラジアル型パラシュート」(水色の側面取り付けパラシュート)に変更します。2個の対象配置で取り付ける事を忘れずに。本機体では高速時の減速を機体姿勢制御によって行うので、その飛行経路に適していて減速性能が高いMk2-Rにパラシュートを交換します。
さらにRT-5フリー固体燃料を含む下側を捨てて、代わりにパーツカテゴリ「燃料タンク」から「FL-T200燃料タンク」を3つ直列に付けます。その下にパーツカテゴリ「エンジン」から「LV-T45″スウィーベル”液体燃料エンジン」を装着します。このエンジンは噴射方向を変える事が可能であり、機体の向きを変えやすいです。外観がよく似たLV-T30リライアント液体燃料エンジンの方が軽くて高性能なのですが、こちらのエンジンは噴射方向が固定であるため、進行方向を変える事が難しいです。今回はLV-T45スウィーベルを使います。これらが第2段となります。

パラシュートを交換し、デカプラーの下に液体燃料タンクとエンジンを付ける
次に第一段を作ります。LV-T45スウィーベルの下にTR-18Aスタックデカプラーを取り付け、その下にFL-T200燃料タンクを8個取り付け、一番下にまたLV-T45スウィーベルを取り付けます。これが第一段となります。

液体燃料エンジンの第一段
しかし、このままでは打ち上げ時のロケットの重量が推力を上回っているので、ロケットは1mたりとも浮きません。よって打ち上げ時に推力を増強するブースターを取り付けます。スペースシャトルやHⅡ-Aに付いている側面ブースターと同じ物です。今回のロケットの場合、パーツカテゴリ「連結装置」から「TT-38K ラジアル型デカプラー」を2個の対象配置で、1番下から3番目のFL-T200燃料タンクの側面に取り付けます。下の画像を参考にして下さい。
このラジアル型デカプラーは横方向にパーツ(主にブースター)を取り付けることができ、動作するとラジアル型デカプラーごと横についていたパーツが投棄されます。この動作によってロケット上昇中に燃え尽きたブースターを切り離して捨てる事ができます。

ラジアルデカプラーの取り付け
そして、ラジアル型デカプラーに固体燃料ブースターを取り付けます。パーツカテゴリ「エンジン」から「BACC”サンパー”固体燃料ブースター」を2個の対象配置でTT-38K ラジアル型デカプラーに取り付けます。
ここでよく生じるミスが、固体燃料をデカプラーに取り付けたつもりで燃料タンクに直接付けてしまうミスです。固体燃料ブースターがちゃんとデカプラーに接触している際はボコっとなるような感じやクリック感があります。(言葉では言い表しにくいのですが・・・)
固体燃料を取り付け終えたら、ロケットの横から見てデカプラーに装着されているか確認します。FL-T200燃料タンクと固体燃料ブースターとの間にラジアル型デカプラー分のスキマができていれば取り付け成功です。失敗している場合はスキマがありません。
固体燃料ブースターのラジアル型デカプラーへの取り付けを確認した後、下のシーケンス確認の画像の通りに打ち上げシーケンスが設定されていればこれでロケットの完成です。名前を「Kerbal-2」と付け保存しておきましょう。

成功例
デカプラーに固体燃料が装着されている
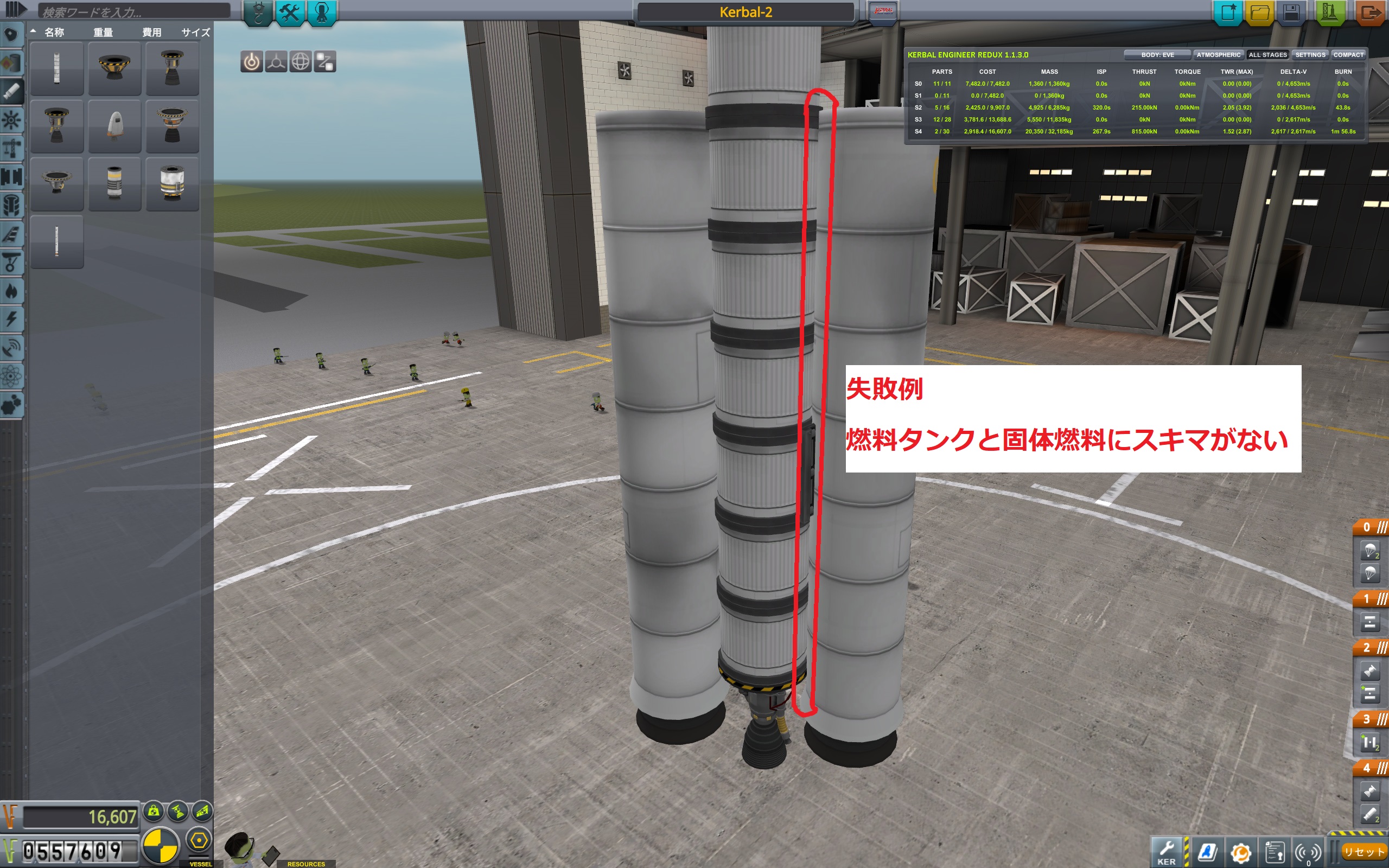
失敗例
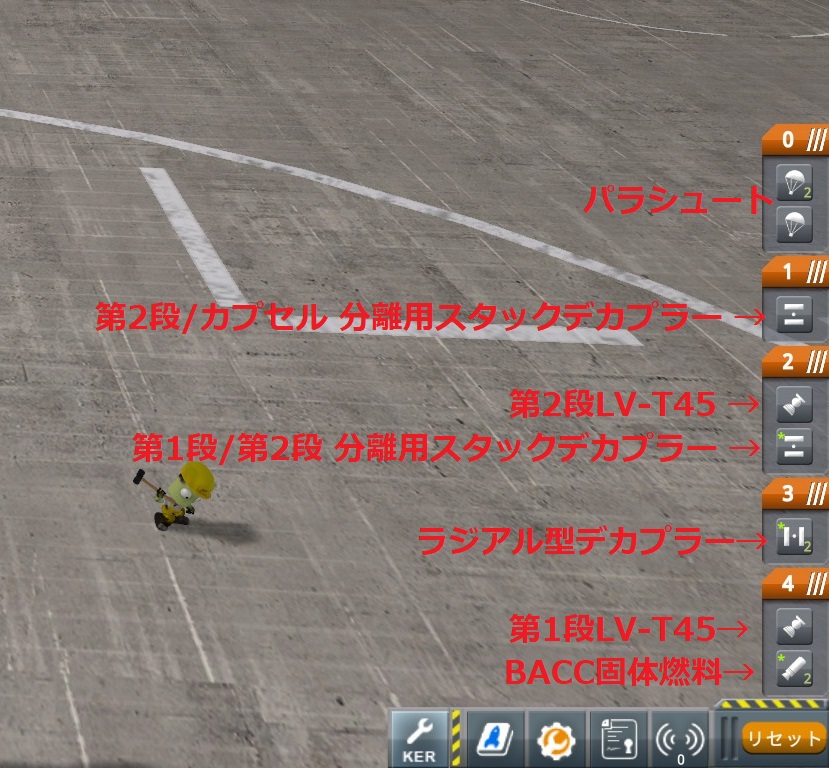
Kerbal-2の打ち上げシーケンス確認
ロケットの保存後、さっそく打ち上げ・・・といきたいのですが、「打ち上げ」ボタンを押しても画像のように「重量オーバーです!」という警告が出て打ち上げることができません。現状での発射台での最大機体重量は18tなのに対して、Kerbal-2の重量は32tです。このような機体制限に関する警告は画面右下にある「エンジニアレポート」で好きな時に見る事ができます。(「エンジニアレポート」の文字を左ドラッグで表示領域を拡大可能)
今回の場合は発射台を強化することにします。まず、右上の「施設を出る」ボタンで組立棟を出ます。
その後宇宙センターの右奥にある発射台を右クリックするとアップグレード画面が出るので、50000資金払って発射台をアップグレードします。すると発射台での最大機体重量が18tから140tに強化されます。これで小規模な月探査ロケットまで対応可能となります。

発射重量オーバー警告

発射台の改良
4.3 打ち上げ
今回の打ち上げ全体の流れを説明すると、
(ここで全て覚える必要はありません。サラっと流し見する程度で)
打ち上げ-周回軌道まで
発射台 → SASを入れる&Zキーを押して推力を100%にする → スペースキーで打ち上げ開始 → 固体燃料ブースター分離&ロケット操縦開始 → Dキーで機体をゆっくり東に傾ける。高度20000mで70度、40000mで45度、 60000mで0度が目安 → 第1段が燃焼終了したらXキーを押して推力0%にしてから第1段/第2段分離 → Mキーを押して最高高度(AP)を確認 → W, S, A, Dキーで機体を進行方向に微調整する → 最高高度の1000m手前でZキーを押して噴射開始(これをアポジキックと言う) → PE出現後にPEが高度70000m以上になったらXキーで噴射終了 → (心ゆくまで宇宙空間をお楽しみください)
帰還編
F5でクイックセーブを行う → 帰還開始 機体を逆行方向に向ける → Shiftキーを一瞬押して弱く噴射開始(これが軌道離脱噴射) → PEが高度30000m程度になったらXキーで噴射終了 → パラシュートを展開予約 → サービスベイを開ける → 高度70000mを切ったらすぐにGoo、温度計、圧力計で科学実験を行う → サービスベイを閉じる → 機体の進行方向を逆方向に合わせる(なるべく高度60000mまでに行う)後は放置→ パラシュートが自動で開いて着陸
とかなり複雑です。言葉に書き出すと長くて面倒に見えるのですが、実際の操作はそこまで難しくありません。順番に説明していきます。
また、機体の操縦中はいつでもEscキーでポーズする事ができます。機体の操作に迷ったらポーズをしてこのページなどを確認するのが良いと思います。
その上、操作の失敗やバグなどで機体が破壊されても「飛行のやり直し」で打ち上げの最初からやり直すことができます。
また、機体がグラグラしてどうしても操縦しにくいという場合は
Tips 1. 機体がグラグラしてしまう場合は「自動支柱」を利用
を参照して下さい。普通に打ち上げられる場合は参照不要です。

Escキーでポーズ
・打ち上げ編
それでは実際に打ち上げを行います。
ロケットが発射台に出現して操作可能になったらTキーを押してSASを有効にします。さらに、Zキーを押してスロットル(推力)を100%にします。液体燃料エンジンは推力が可変であり、打ち上げ時は推力100%にします。スロットルの操作は、
Zキー:スロットル100%
Xキー:スロットル0%(噴射停止)
Shiftキー:スロットルを上げる
Ctrlキー:スロットルを下げる
となります。
Shiftキーを一瞬押せばスロットルはわずかに上がり、押し続けるとどんどんスロットルが上がっていきます。
また、スロットル右隣の青色の球がNavball(姿勢指示器)であり、ロケットの現在の姿勢や進行方向を示します。後の機体制御に使い、Navballと言ったらこれを指します。
SASの有効化とスロットルが100%になったのを確認したらスペースキーで打ち上げ開始です。後の固体燃料ブースター燃焼終了までどのキーにも触れる必要はありません。(触れないで下さい)
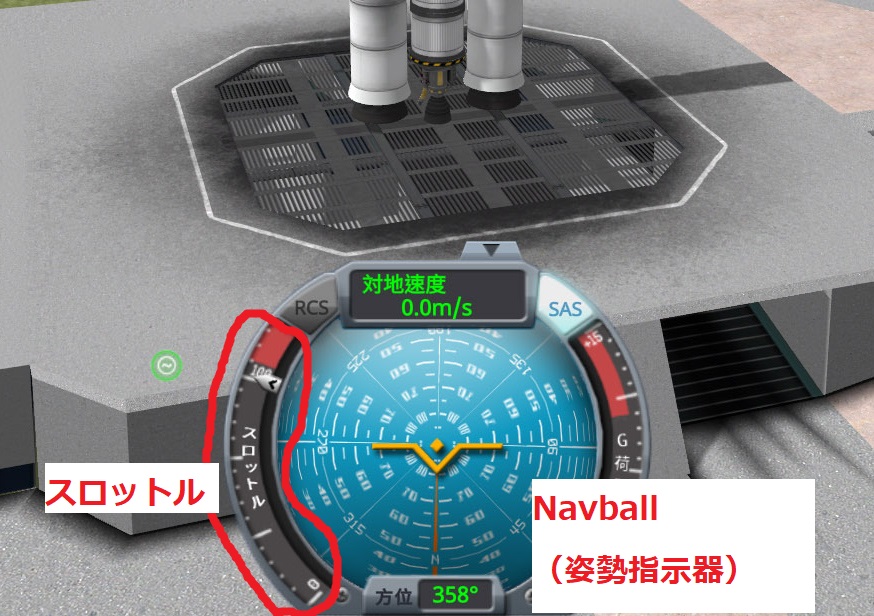
スロットルとNavball
打ち上げ開始後42秒後にBACC固体燃料ブースターの燃焼が終了するのでスペースキーで分離します。
分離後、Navballで角度を見ながらDキーを小刻みに押して機体をゆっくり東へ傾けます。
以下の画像でも示しますが傾け角度の目安が
・高度20000m:70度
・高度40000m:45度
・高度60000m:0度
となります。
40000mに到達した瞬間にDキーを押しっぱなしにして70度から45度にするのではなく、20000m70度の時点から小刻みにDキーを押して徐々に機体を傾けて下さい。60000mでも同様です。
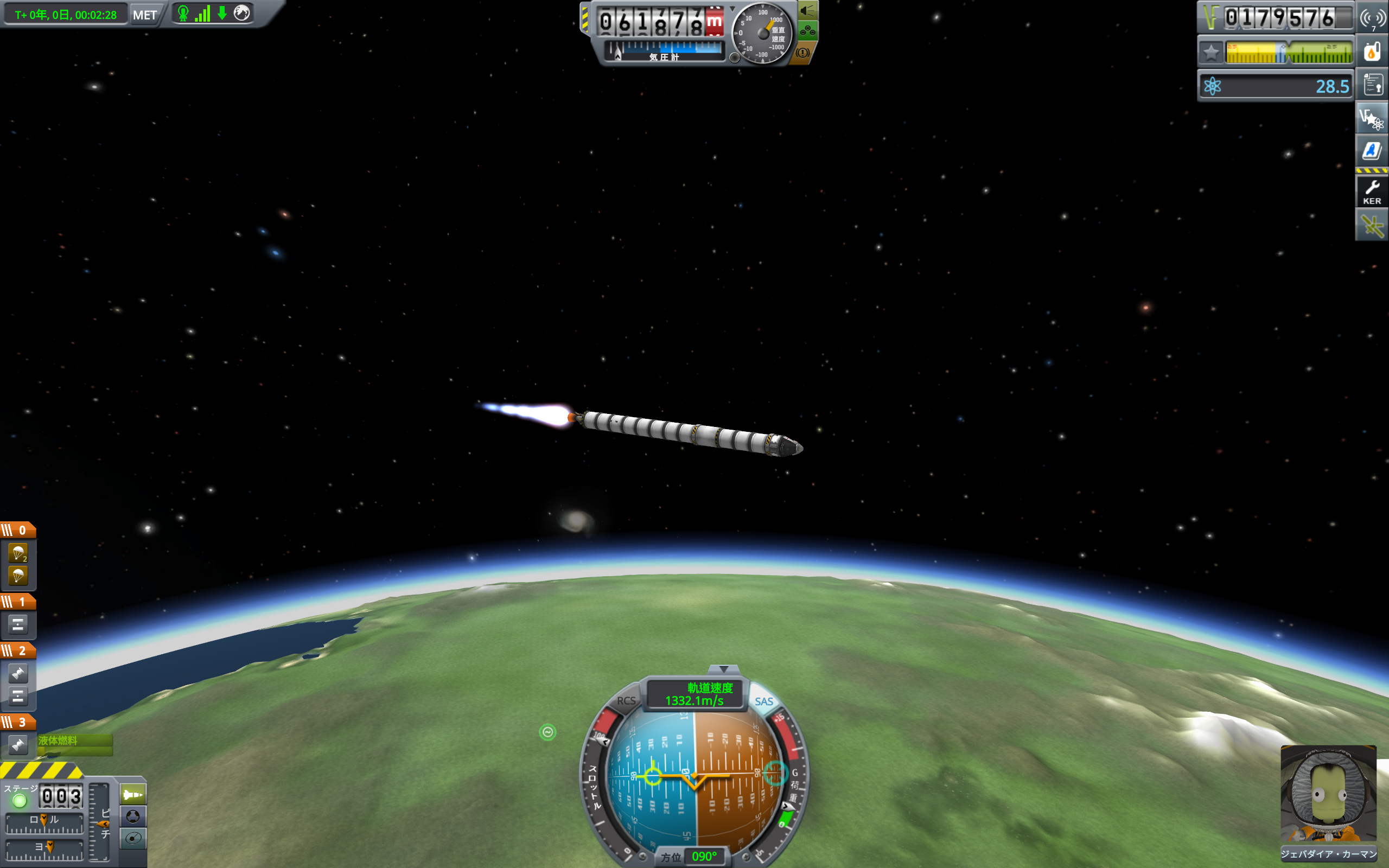
60000m付近で角度0度にした後は第1段が燃焼終了するまでそのままの姿勢を保ちます。
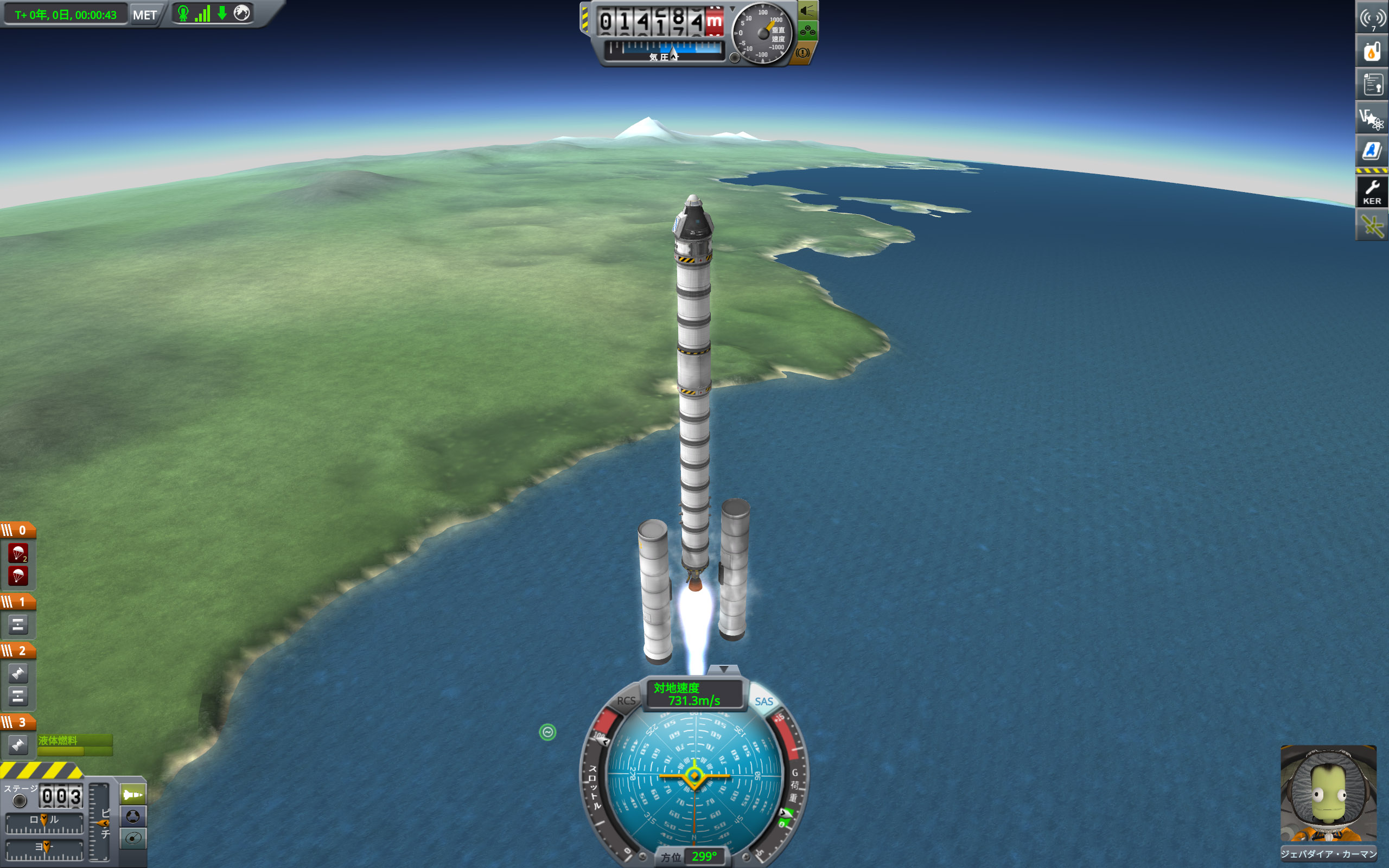
打ち上げ後42秒で固体燃料ブースター分離

Navballでの角度の読み方

機体操縦開始
Dキーを小刻みに押す

高度20000mで東20度に傾ける
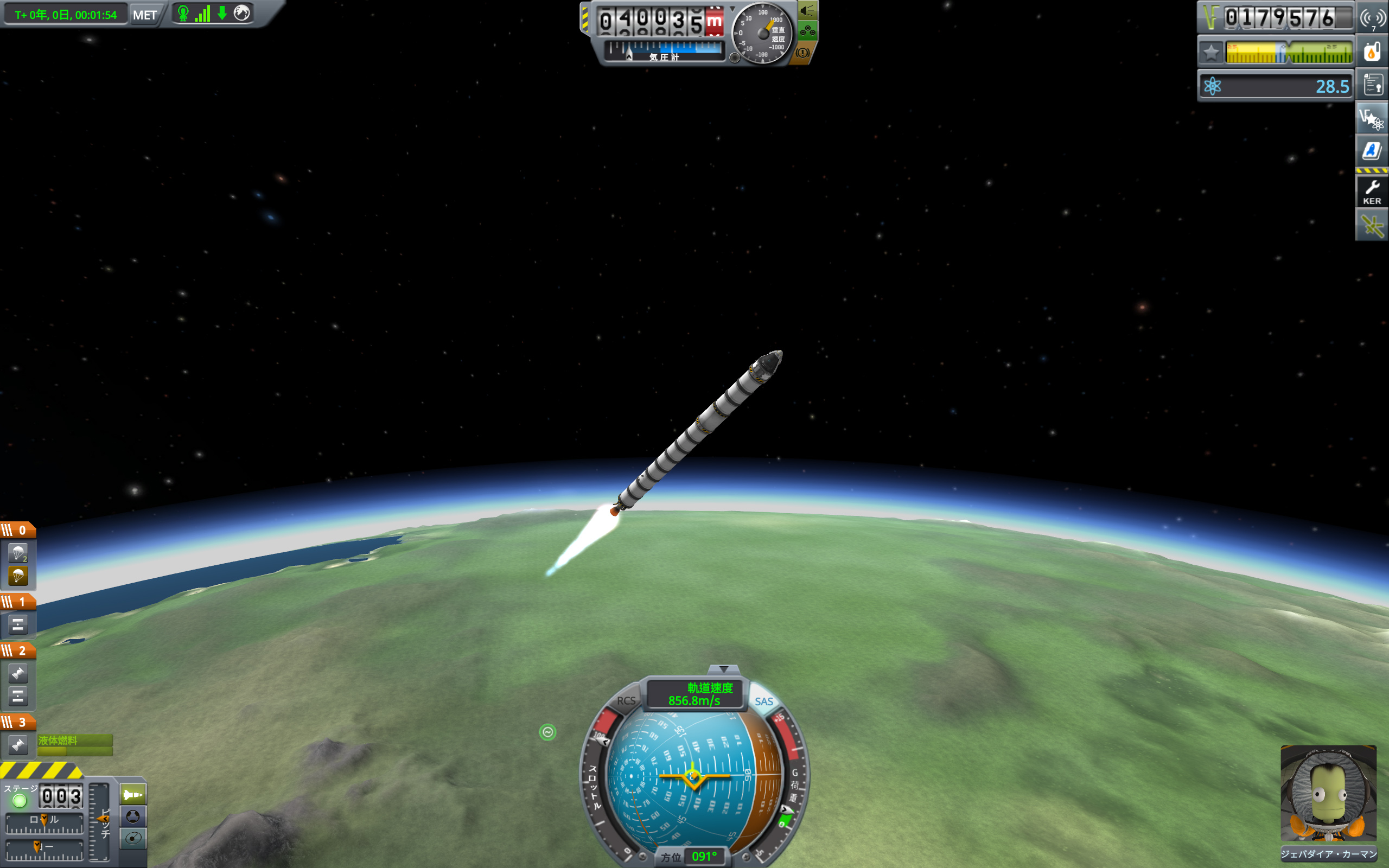
高度40000mで東45度
高度60000mで東0度
東0度でそのままの姿勢を保っていると、高度70000m付近で第1段の燃料が付きて燃焼終了するはずです。そうしたら、Xキーを押してスロットルを0%にしてからスペースキーを押して第1段を分離します。
そしてそのまま慣性で飛行しつつ、Mキーを押して軌道マップに切り替えます。ここで遠地点(apoapsis or apogee 略してAP、アポジ)高度を確認します。遠地点とは周回軌道上で最も高度が高い点の事です。
(以後、遠地点は赤字で示します。)
マップ上で灰色文字でAPと表示されている箇所が遠地点です。そこへマウスカーソルを重ねると遠地点の高度が表示されます。

Xキーでスロットルを0%にしてから第1段分離

軌道マップ上に表示されている「AP」にマウスカーソルを置いて遠地点高度を確認
このままロケットを放置すると機体は遠地点を通過後、高度を下げて地上に戻ってきます。
その前に近地点(periapsis or perigee 略してPE、ペリジ 近地点は青字で示します)を上げる必要があります。
近地点とは周回軌道上で最も高度が低い点の事です。現在では近地点は地面に埋まっている(近地点高度がマイナス)のため見る事はできません。
近地点高度が0以上になると軌道マップ上に出現します。
ここで一番覚えていただきたい性質が、軌道上で進行方向に加速すると軌道の円で加速地点とは反対側の高度が上がることです。
そして遠地点と近地点は常に円の反対側同士に位置するので、近地点を上げたければ遠地点で加速するのが一番効率が良いです。
逆に、近地点高度を下げたい場合は遠地点で進行方向に対して減速(=進行方向とは逆に噴射)すればいいのです。
以上の2つをまとめて言うと、近地点高度を上げ下げしたい時は遠地点で加減速します。
逆に遠地点高度を上げ下げしたい場合は近地点で加減速すればいいのです。
これは文字で追うより実際にやってみた方が絶対に理解が速いです。以下の画像で説明します。
再度Mキーで機体側画面に戻り、まず機体の進行方向、いわゆる「順行」(Navball上の緑色の〇)と機体の向き(Navballの中心)をW, S, A, Dキーで合わせます。大抵はAキーを少しチョンと押すだけで合います。軌道上では徐々に2つがずれていくのですが、噴射の直前にだけ再度微修正すれば大丈夫です。
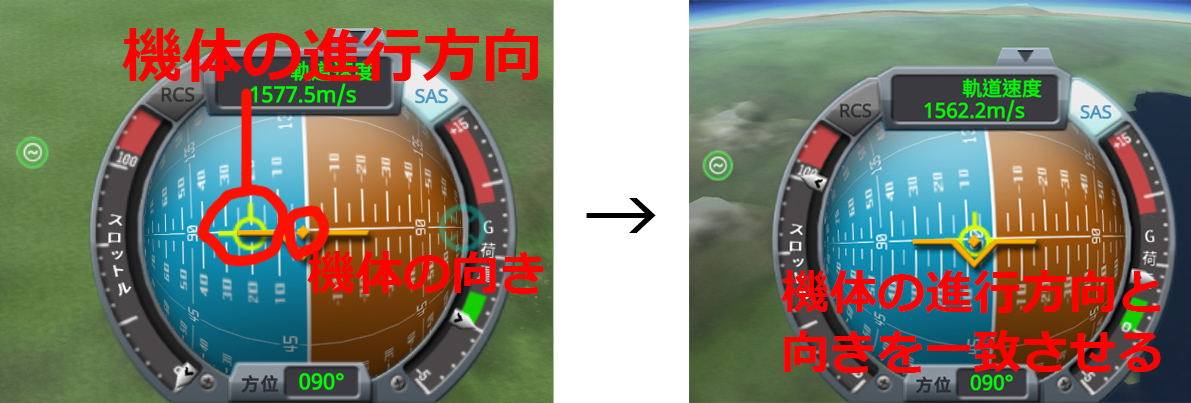
進行方向と機体の向きを合わせる
また、今のうちに軌道マップでも機体の操作ができるようにしておきます。
軌道マップ中央下に位置する灰色の逆三角形を左クリックすることでNavballが表示されます。これで軌道マップでも機体の操縦やスロットルの操作が可能となります。

軌道マップでのNavball呼び出し
その後、確認した遠地点高度の近くまで待機します。
現在の高度が遠地点高度よりも1000m低い位置に到達したら、進行方向と機体の向きが重なっているのを確認してからZキーを押してスロットルを全開にして進行方向へ加速します。
そしてそのままMキーを押して軌道マップに切り替え、APの反対側に注目します。加速を続けていくと灰色線の軌道がどんどんKerbinの裏側まで伸びていき、やがて1周して円になるのと同時に近地点PEが出現します。
このPEにマウスカーソルを重ねて近地点高度を表示させ、PEが高度70000m以上になるまで加速します。あまり加速し過ぎると帰りの燃料が不安なので、75000m程度で十分です。100000m前後でも問題はありません。

エンジンを再点火して進行方向へ加速中
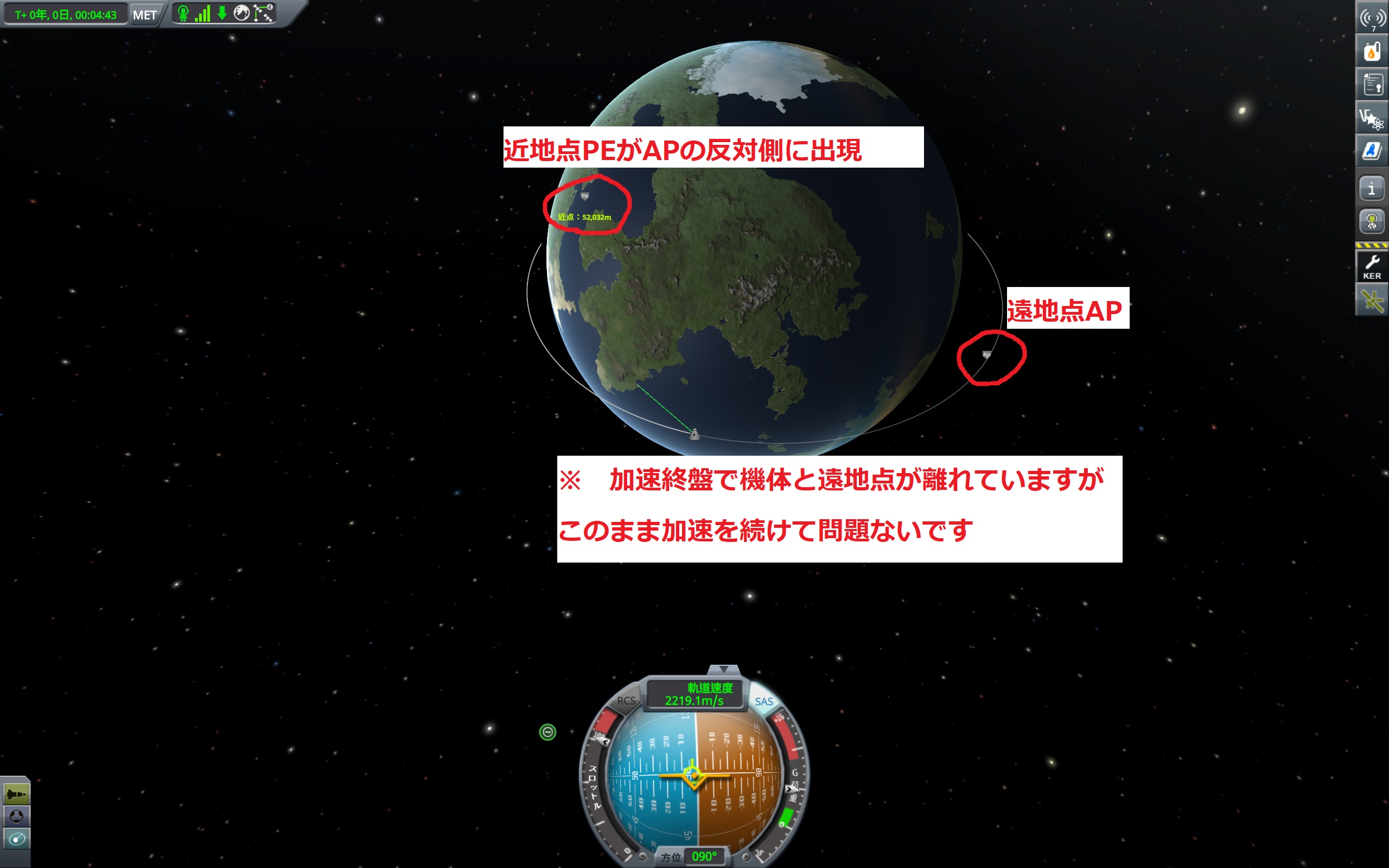
加速を続けると近地点PEが出現し、近地点高度が上がっていく

近地点PEが70000m以上になったため加速終了
これで安定したKerbin周回軌道に到達しました。慌ただしかった前回の大気圏突破と異なり、操作を加えない限りはこの機体はずっと宇宙にあり続けます。心ゆくまで宇宙空間をご堪能下さい。ツイッターやインスタグラムに投稿する写真はこの時にF1キー(KSPのスクリーンショット)やF12キー(Steamでのスクリーンショット)で撮影する事をお勧めします。
また、ここで「F5」キーを押してクイックセーブを行います。これでもしも帰還時に問題が生じて機体が爆発してもその場で「F9」キーでクイックロードを行えばクイックセーブをした地点まで戻ってくることが可能です。
帰還時は危険なためここでクイックセーブを行う事を強くお勧めします。
・帰還編
宇宙をご堪能し終わったら帰還を始めます。まずNavball上にある緑色の円の中にバツ印が書かれたマークである「機体の進行方向に対する逆行方向」、いわゆる「逆行」と機体の向きを重ねます。このページ通りの飛行をしている場合は通常、Dキーを押し続けてNavballを半周ほど回すと出てきます。
マークが似ている「順行」ではないので気を付けて下さい。ちなみに「順行」と「逆行」はNavball上で反対の位置にあります。
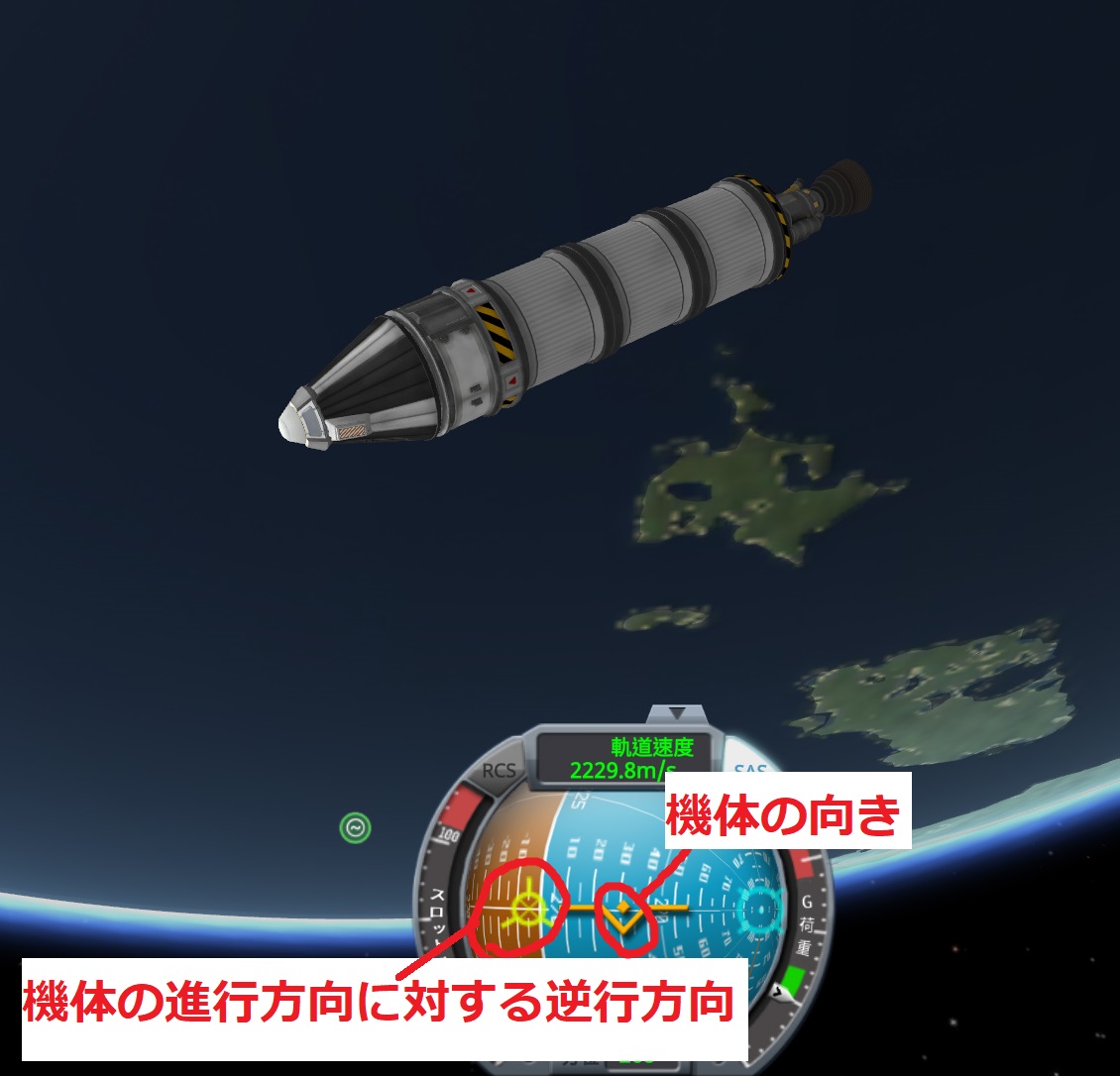
「逆行」と「機体の向き」を合わせる
「逆行」マークと機体の向きを重ねたら好きなタイミングでShiftキーを一瞬押し、弱く噴射を開始します。するとPEマークが移動しつつ高度を下げていくのが分かると思います。そのままゆっくりとPE高度を下げて、高度30000m程度になったらXキーで噴射を止めます。なるべくPE高度20000~35000m程度の範囲に入るようにします。
もしもPE高度を下げ過ぎたら、今度は「順行」と機体の向きを合わせてShiftキーを一瞬押し、弱く噴射するとPE高度が徐々に上がっていくのでそれで調整します。
この一連の逆行方向への噴射が世間でよく言われる「逆噴射」、あるいは「軌道離脱噴射」となります。
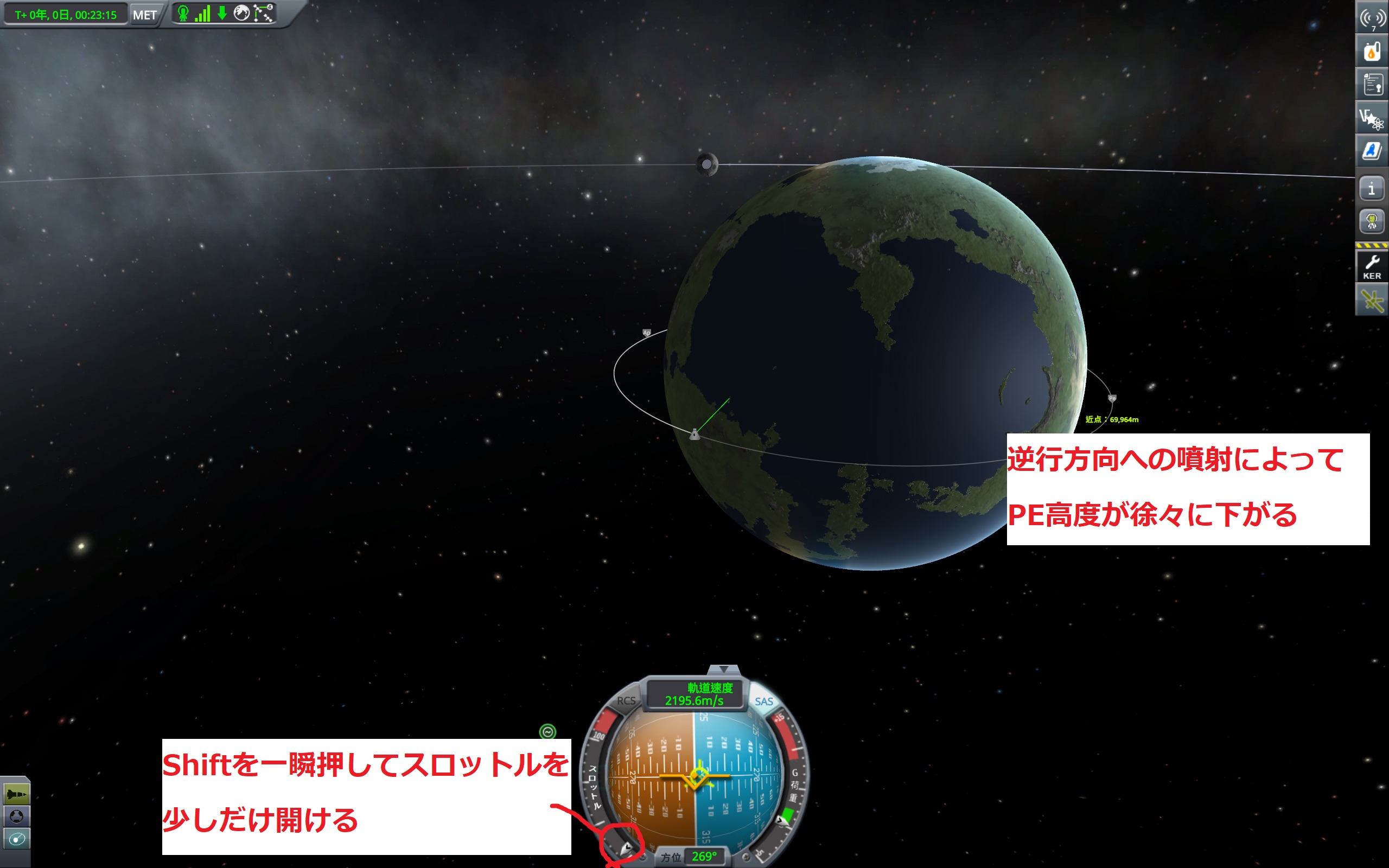
PE高度を少しずつ下げる
PE高度下げが完了したら、第2段はもう不要なのでスペースキーで切り離します。さらにスペースキーでパラシュートの展開予約をしておきます。
そして、サイエンスポイントを稼ぐためにKerbin大気圏上層部での科学実験を行います。そのため大気圏突入前に画像のようにサービスベイを開けておきます。(収録の事情でパラシュートの種類が違う機体が映っていますが、本ページで説明している青色パラシュートの機体の方が安定性が高いです。)

第2段分離およびサービスベイ解放
このまま待機しているといずれ高度70000mを切ります。そうしたらすかさずGoo、気圧計、温度計の3種の科学実験を行います。そしてすぐにサービスベイを閉じます。

Kerbin大気圏上層部における科学実験
サービスベイを閉じ、現在の高度が60000m前後になったら「逆行」マークと機体の向きを再度重ねます。これで機体は進行方向に対して空気抵抗が大きい底面を向けて減速に適した姿勢を取った事になります。
1回機体の姿勢を合わせたら、この後はもうキーから手を放していても大丈夫です。大気圏突入中に空気抵抗で機体が傾いていきますが今回加熱に晒されるパーツは全て耐熱性が高く、ちょっとの事では熱によって崩壊しません。

実験終了後、「逆行」マークと機体の向きを合わせる

大気圏突入中に傾く機体
機体は健全性を保っている
空力加熱のエフェクトが終わってから適切な速度と高度になるとパラシュートが自動で展開します。
そして、着陸地点が海、平地、草原、砂漠といった平面ならば良いのですが、もしも山岳などの傾斜が激しい地点に着陸してしまうとカプセルが転がって機体にダメージが入る可能性があります。もしもこのような事態が生じたら、F9キーでクイックロードを行い「逆行」方向への噴射タイミングをズラして下さい。そうすれば着陸地点も変わります。これが逆行噴射を行う前にクイックセーブを強く推奨した理由です。
無事に平らな場所に着陸した後は、そこでも大気圏上層部で使用していない方のGoo、気圧計、温度計の科学実験を行えばさらにサイエンスポイントを稼ぐことが可能です。余裕があれば試してみて下さい。

砂漠に着陸したため砂漠でのクルーレポートを書く
今回の飛行で40ポイント以上のサイエンスポイントを稼ぎ、合計のサイエンスポイントは76となりました。
また、パイロットのジェバダイア・カーマンが周回軌道から帰還したため経験値を得てレベル1に昇進しました。これによってジェバダイア・カーマンは「順行」と「逆行」の自動追尾能力を得ました。この機能は第2段目の噴射で軌道に乗る時に有用です。加えて大気圏再突入中時に適切な姿勢である機体の底面を進行方向に向け続けるなどのシーンでも非常に有用です。(機体底面は空気抵抗が大きく減速しやすい)

41.5サイエンスポイントを得た

ジェバダイア・カーマンがレベル1になった。追加された「順行」と「逆行」の自動追尾はとても便利
次は月(Mun)を目指したいのですが、月へ向かう大型ロケットを作るためにはまた新たなパーツが必要な上に資金も不足気味です。
よって次回は少しの間だけサイエンスポイントと資金を稼ぐことにします。
第4章終わり
Tips 1. 機体がグラグラしてしまう場合は「自動支柱」を利用