8. 月着陸-帰還
本章ではいよいよMunへの着陸を目指します。着陸操作は慣れるまでやや難しいので、要所要所での頻繁なクイックセーブをお勧めします。
8.1 Mun着陸用ロケットの組み立て
前回得たサイエンスポイントを消費して「フライトコントロール(45ポイント)」、「大型ロケット工学(90ポイント)」、「着陸技術(90ポイント)」、「電気工学(90ポイント)」を開発します。
これでサイエンスポイントは 443-45-90-90-90 = 128 ポイントとなりました。もしもサイエンスポイントが足りない場合はフライトコントロールと電気工学は開発しなくても大丈夫です。
また、もしも研究開発センターを1段階アップグレード(451000予算が必要です)しても予算が70000以上残るようであれば、アップグレードを実行しておくと後にMunで得られるサイエンスポイントが増加します。

研究開発センターのアップグレード
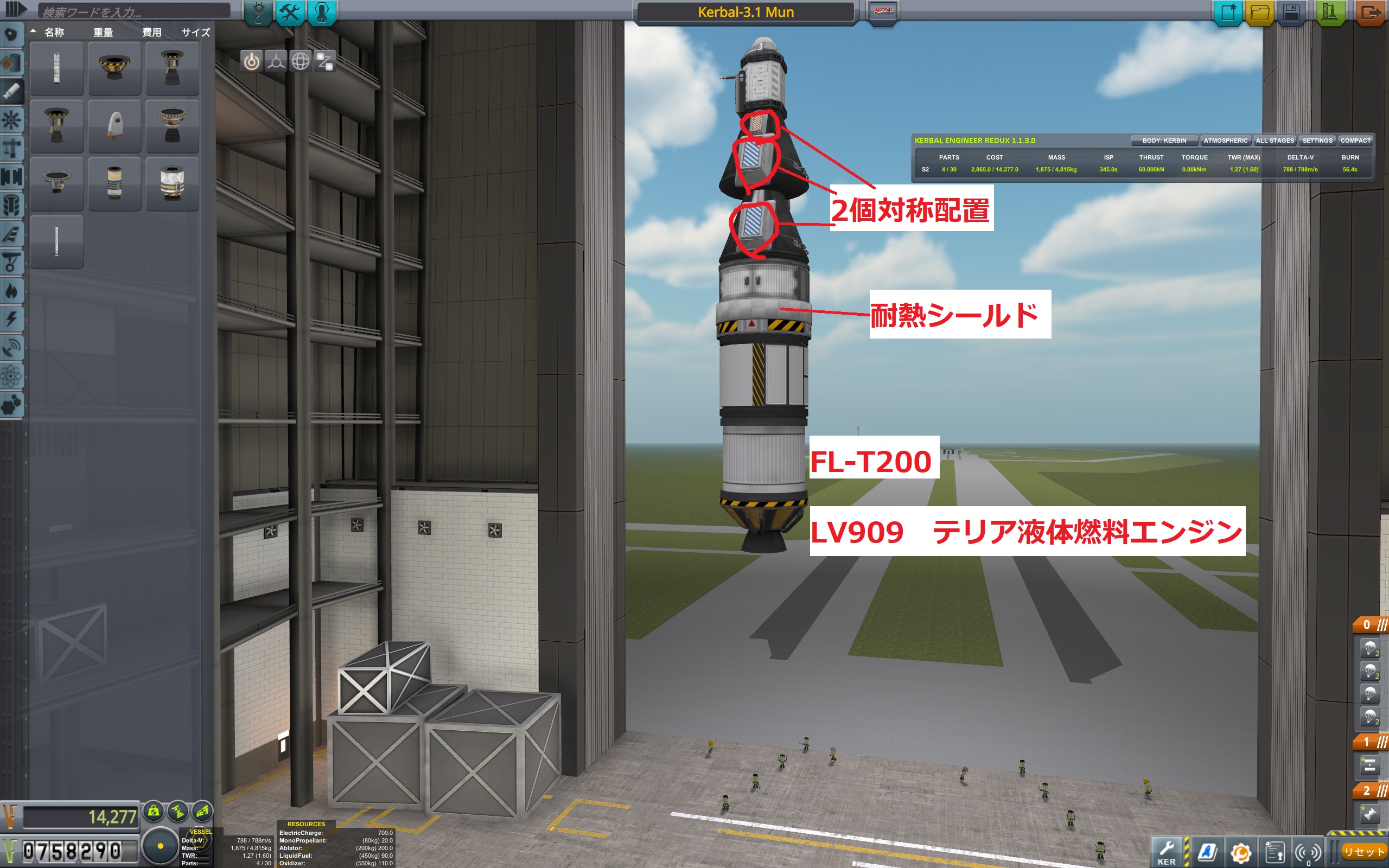
ロケットの上部は前章のMun周回軌道到達用ロケットを改造して作ります。着陸部の重心が高いと天体表面で転倒してしまうので、なるべく低重心にします。とりあえず、画像のように作ります。
コマンドポッドを1つ追加し合計2つにして、青側面パラシュートを2個対称配置で追加。サイエンスジュニアは1つに減らし、その下にFL-T200を1つ、さらのその下にLV909テリアを付けます。月での離着陸だったらテリア1つで十分な推力が得られます。
Mun着陸部建造途中
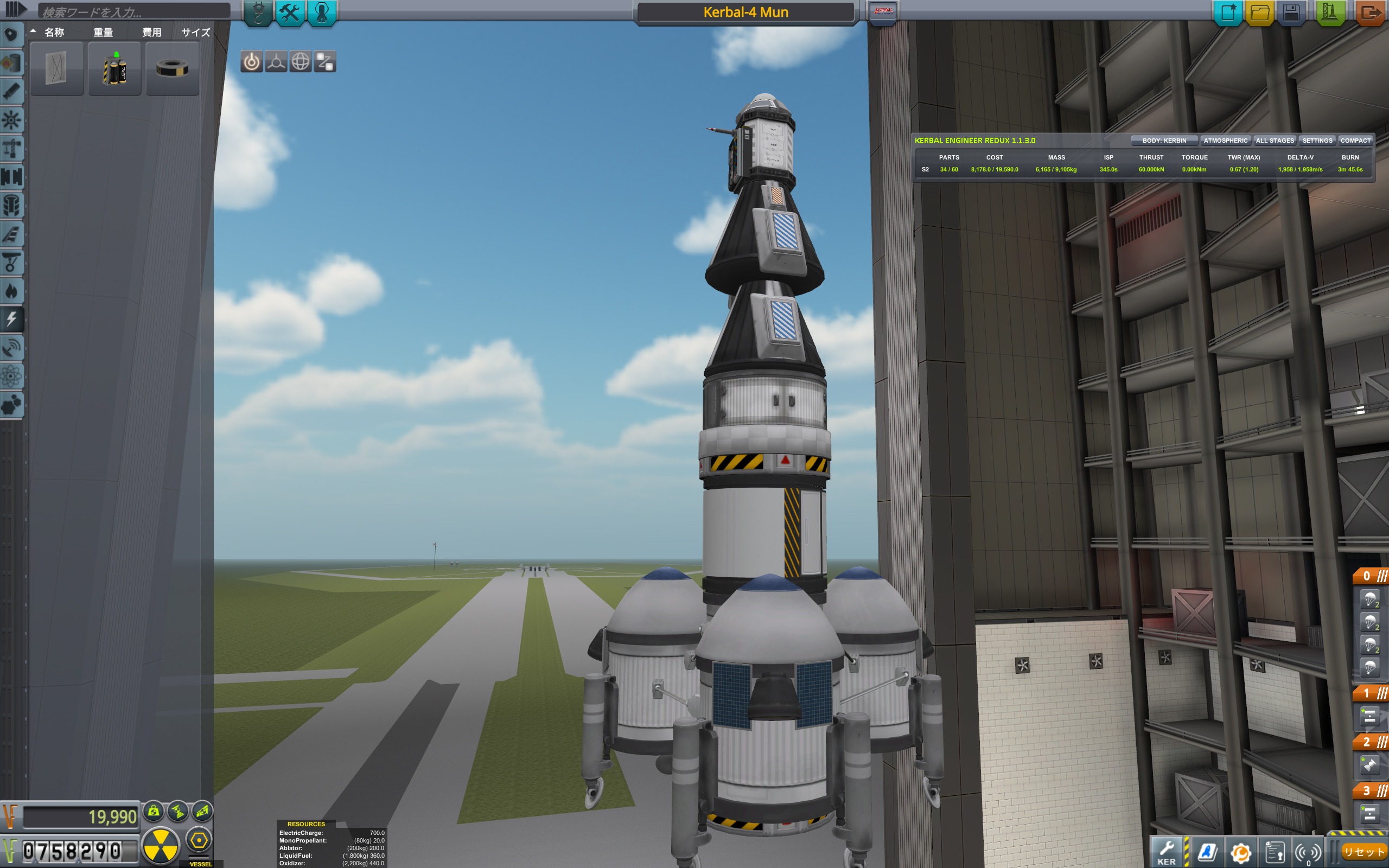
そして、FL-T200の周辺に3個対称配置でさらにFL-T200を付けます。この時、追加するFL-T200は着陸脚の高さを確保するために中心のFL-T200よりも半分の高さくらい低い位置に付けます。そして上部にノーズコーンを付けた後、周囲のFL-T200同士と中心のFL-T200とを針金で固定します。

周辺タンクは針金で強固に固定
そこに周辺のFL-T200にパーツカテゴリ:ホイールから「LT-1 着陸脚」を3個対称配置で2回(合計6本)、電気機器「OX-STAT 太陽電池」を3個対称配置で2回(合計6個)、ユーティリティ「イルミネーター Mk1」(照明)3個対称配置で1回付けます。
そして、着陸脚を右クリックして「収納して発進」を選択します。もし電気工学を研究しておらず、OX-STAT 太陽電池を開発していない場合は搭載しなくても大丈夫です。保険としての搭載です。
着陸脚と太陽電池とイルミネーター(照明)
そして、テリアの下にスタックデカプラーを介して構造パーツ「ロコマックス アダプター」、燃料タンク「ロコマックス X200-32燃料タンク」、エンジン「RE-L10 プードル」の順番で組み立てます。これが第2段目となります。
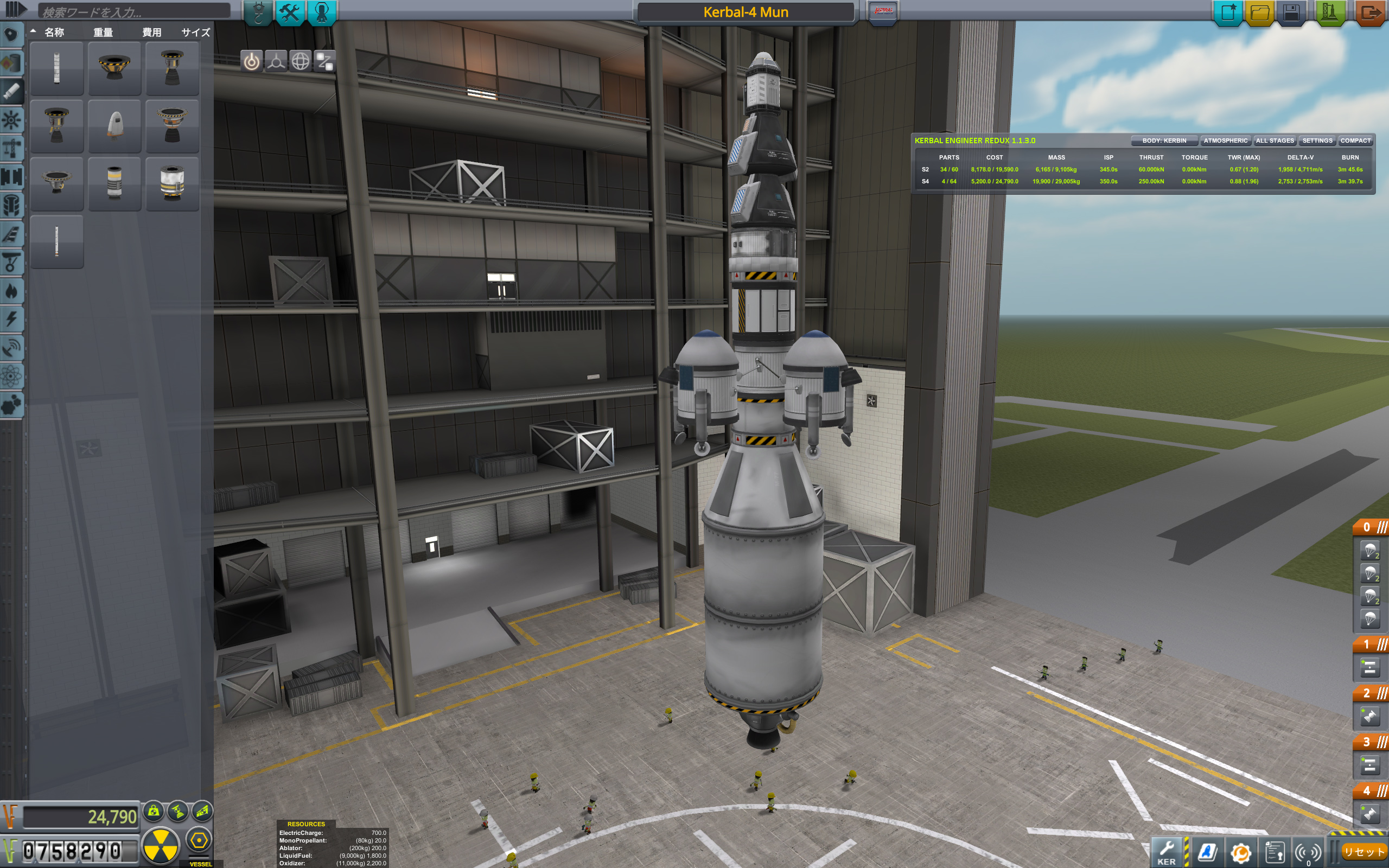
第2段
そして、第1段の組み立てを行うのですがこの機体は上段の重量が大きいため、新規に開発した「RE-I5スキッパー」でも推力不足気味です。その場合、どうするかというと機体を「束ねます」。
現実世界のロケットにおいてもこの問題をどう解決しているかというと、重量物打ち上げロケットのデルタ4ヘビーやファルコンヘビーのように同型の機体を束ねる事によって離床時の推力を確保しています。さらに、今回のMun行きでのロケットでは用いませんが、デルタ4ヘビーとファルコンヘビーは離床時に中央エンジンの推力を絞って(燃料を温存して)、両側部の燃料が尽きて切り離しを行う際に中央エンジンの推力を全力にするという打ち上げ方式を用いています。

ULA デルタ4ヘビー
© U.S. Air Force/Joe Davila

SpaceX ファルコンヘビー © Public domain
今回用いるロケットは、2段目のRE-L10 プードルに連結装置「ロコマックス デカプラー」を介してX200-32燃料タンクを縦に2本繋げ、その下にエンジン「RE-I5 スキッパー 液体燃料エンジン」の組み合わせを作ります。そして、ロコマックスデカプラーの下に繋げたX200-32燃料タンク(2つ重ねた中の上側)をAltキーを押しながら左クリックするとX200-32以下のパーツを複製できるので、それを用いて中心部に対して2つ対称配置します。
この3本の1段目は、中心部と周囲部の燃料タンクを針金で4か所固定、さらに第2段との間も針金で固定します。

パーツを複製中 中心部に対して2個の対称配置で取り付ける
また、このままだと140tの重量制限をオーバーして発射台に行けないので、1段目の燃料タンクから燃料と酸化剤を少し減らして下さい。3本のタンクで均等に減らします。
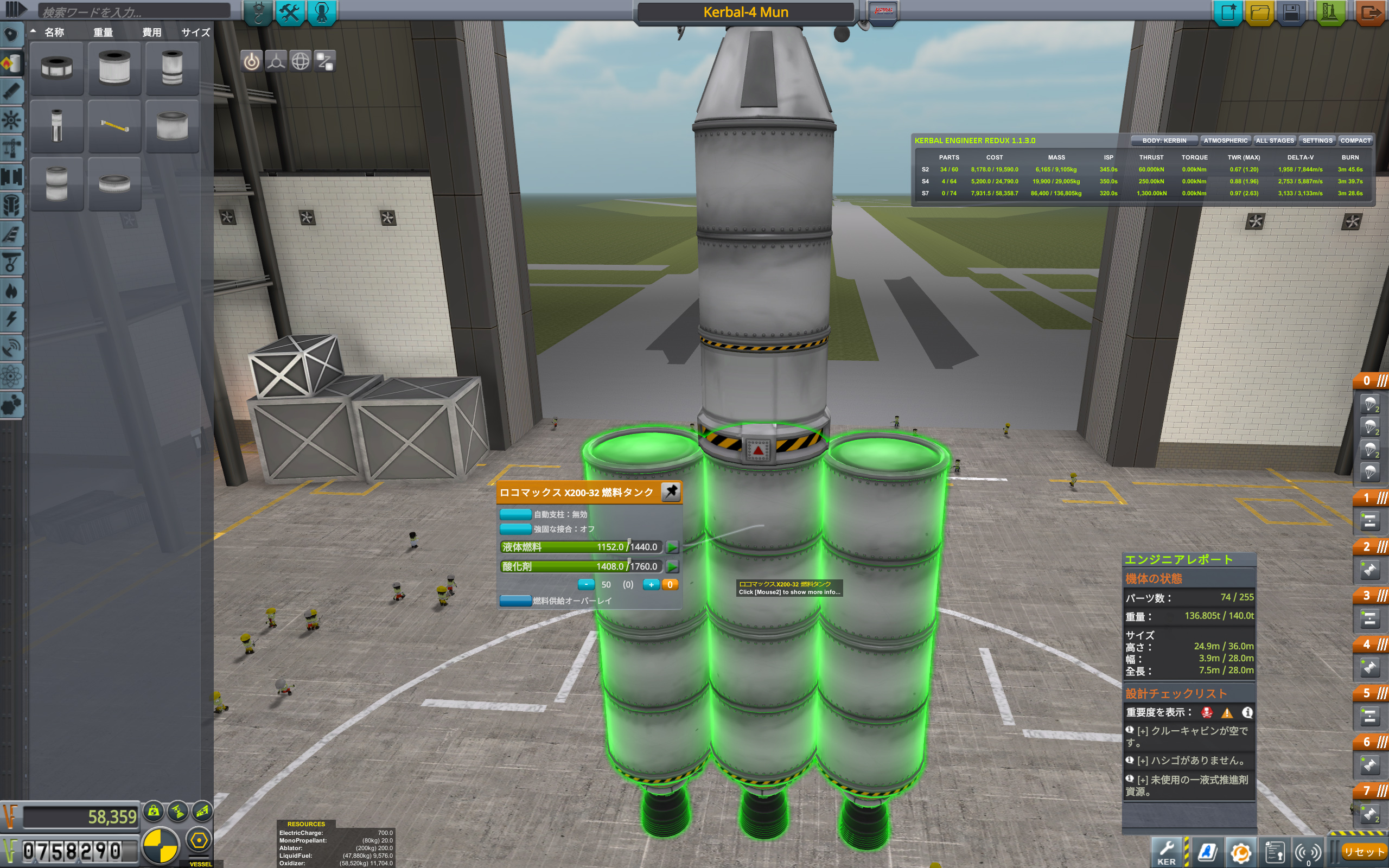
重量オーバー回避のため燃料と酸化剤を減らす
最終的な完成機体はこのようになります。
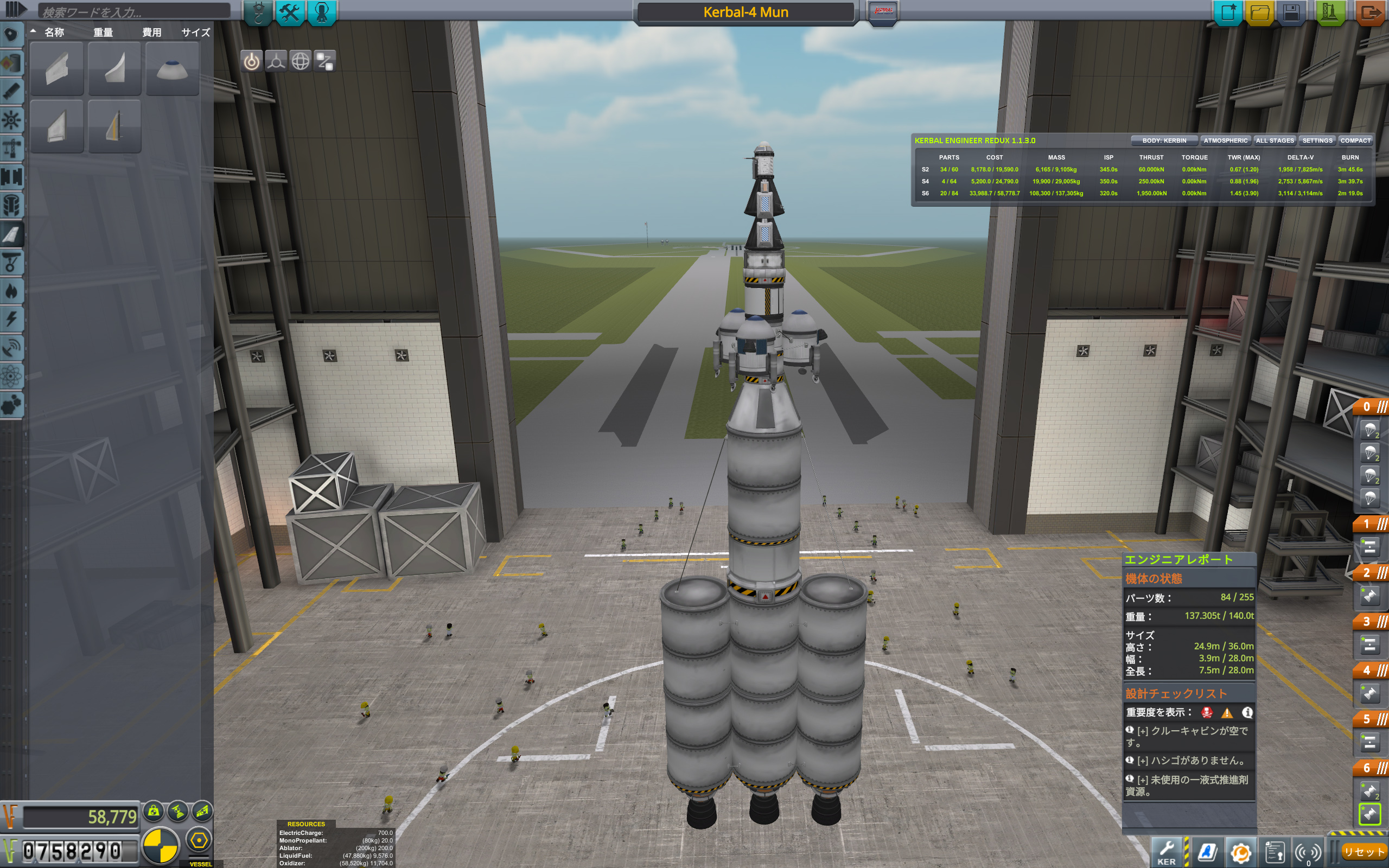
最終的な完成機体 これで月着陸を目指す
最後に上部の搭乗員タブから、搭乗員として科学者のボブ・カーマンを空いているコマンドポッドに乗せます。

科学者のボブ・カーマンを搭乗させる
打ち上げ時の傾け方としては
高度15000m 東70度
30000m 東45度
45000m 東0度
と傾けると良い結果が得られました。高度100000m程度の低軌道へ投入します。
8.2 Mun着陸
前章と同様に、Mun遷移軌道-Mun周回軌道へ入り、APとPEが共に50000m以下になるような軌道に入ります。ここでクイックセーブします。
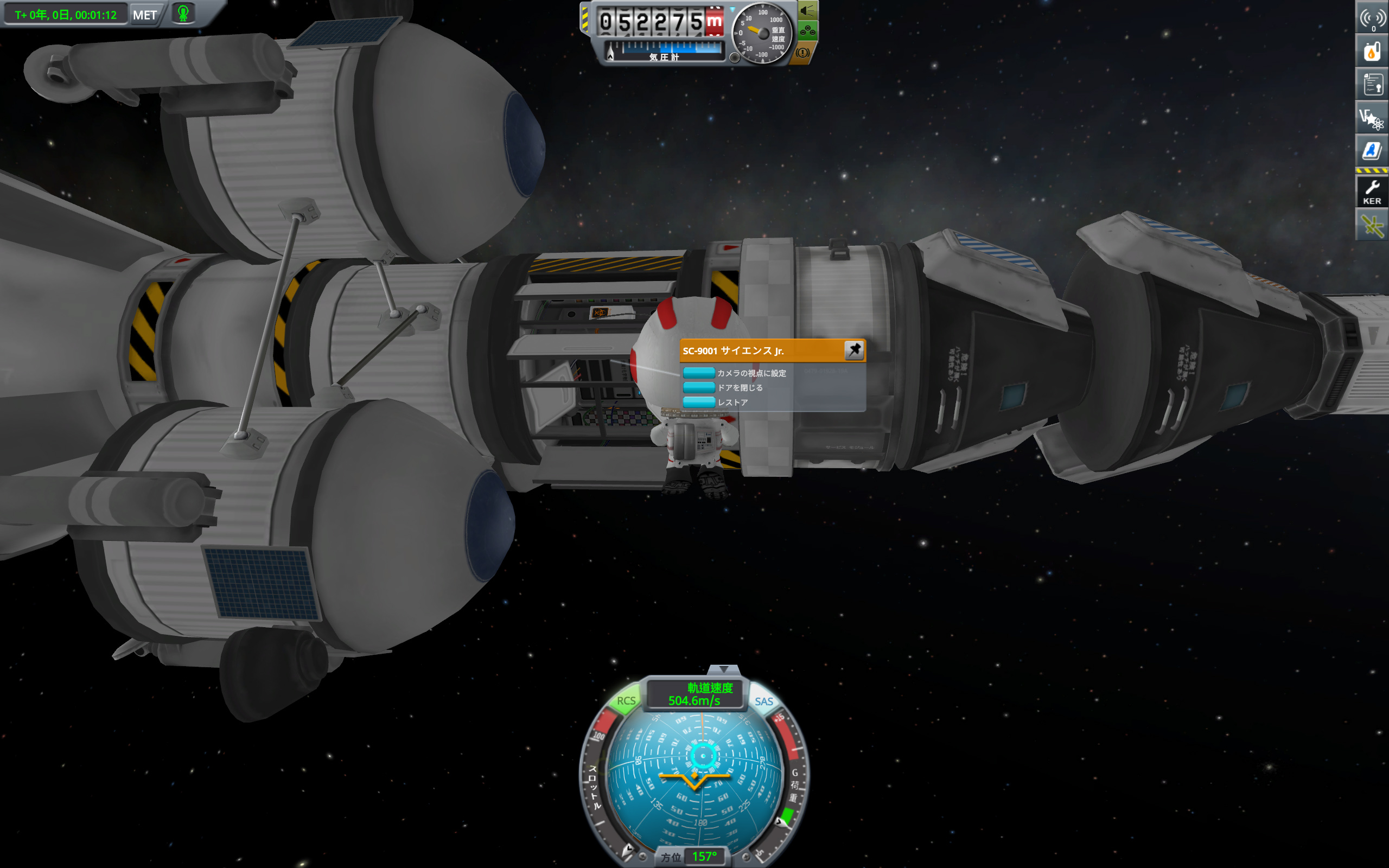
科学者のボブ・カーマンはEVA中に使用済みのサイエンスジュニアとGooを「レストア」で再度使用可能な状態にすることができます。(EVA中の操作は後に記述あり)EVA前に実験用記録装置ユニットにデータを収集しておくのが良いでしょう。今後MunやMinmusで複数の場所に着陸してデータを集める際に役立ちます。下の画像では、Mun低軌道で2回目のサイエンスジュニアの実験を行った後、ボブ・カーマンのEVAでサイエンスジュニアをレストアしようとしています。(EVA中の操作方法は本章で後述)
科学者によるサイエンスジュニアのレストア
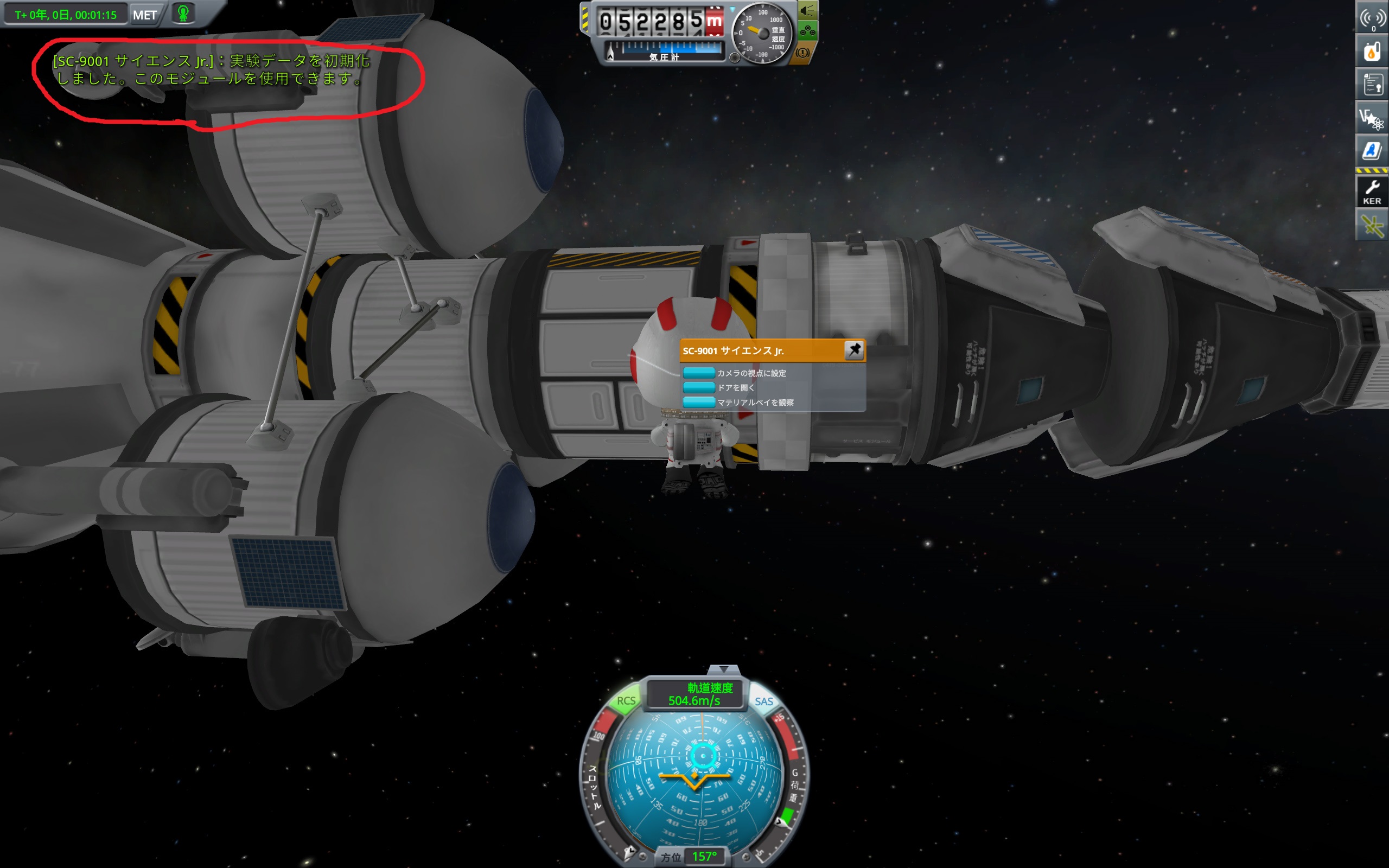
レストア完了(左上にも表示)
いよいよ着陸を行います。一連の操作を行う前にF5でクイックセーブを行います。また、着陸地点の状態が分かるまではここからはクイックセーブをしないことをお勧めします。降下途中にクイックセーブを行ってしまうと、着陸地点が極度の斜面で着陸できない場合、着陸地点を変更するのが面倒になってしまいます。(不可能ではないですが・・・)
マップ上でなるべく平面な場所(クレータがない場所またはクレーターの中心)を狙って、軌道線がMun表面にほぼ垂直で落ちるように減速マニューバを作成します。また、Munは自転しているのでこの時点での着陸予定地よりもわずかに左側に着陸する事となります。画像ではクレーターの端に軌道線が落ちていて良くない例となっています。(この後マニューバをドラッグして修正した)
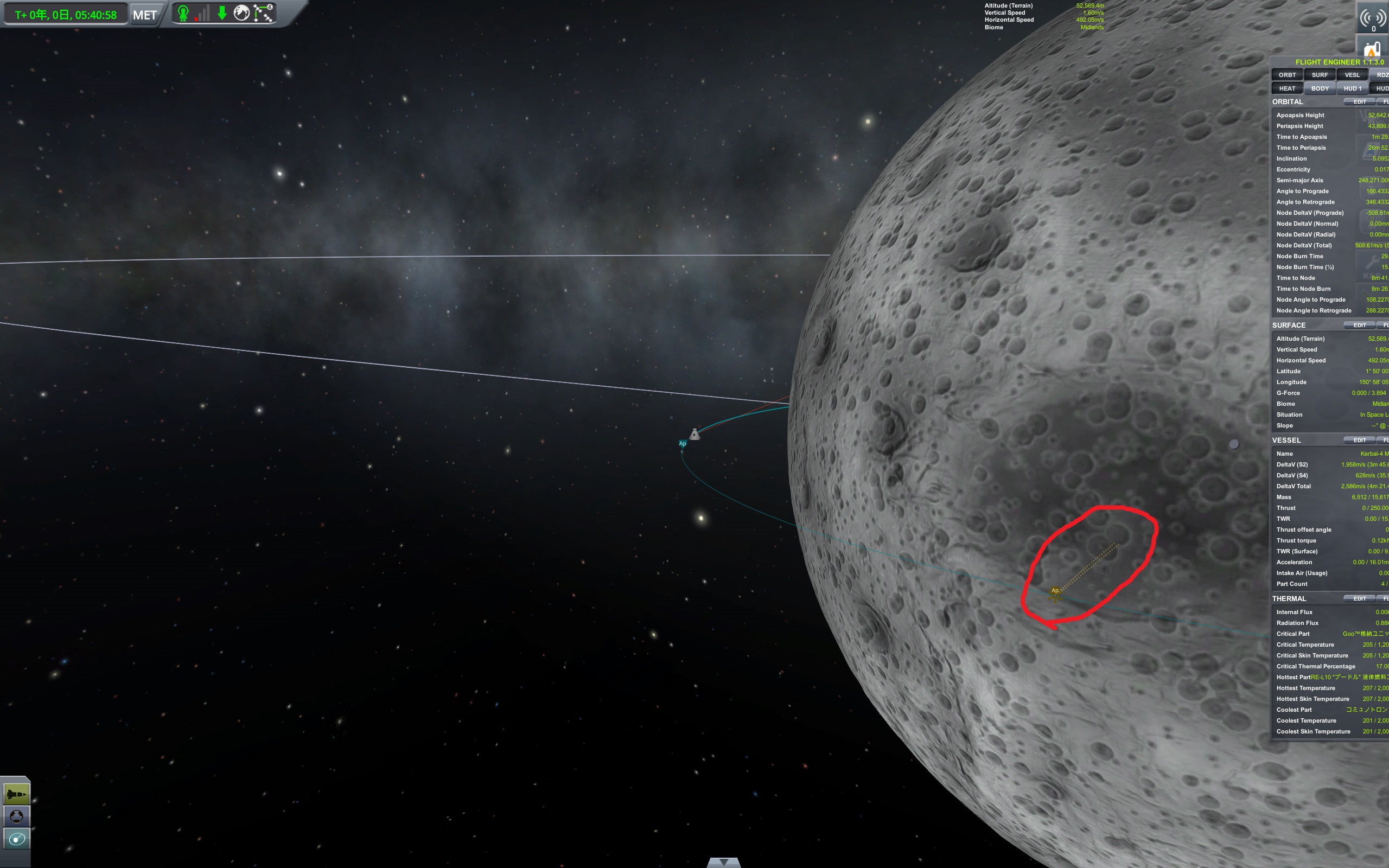
軌道線がクレーターの端に落ちている(良くない例)
設定したマニューバを実行し軌道速度0m/s となったらこの段階で残燃料量にかかわらず第2段を切り離し、着陸段のエンジンを起動します。そして、画面上部の「ランディングギア切り替え」で着陸脚を展開し、その上のボタンでライトを付けます(バッテリーを消費します)。
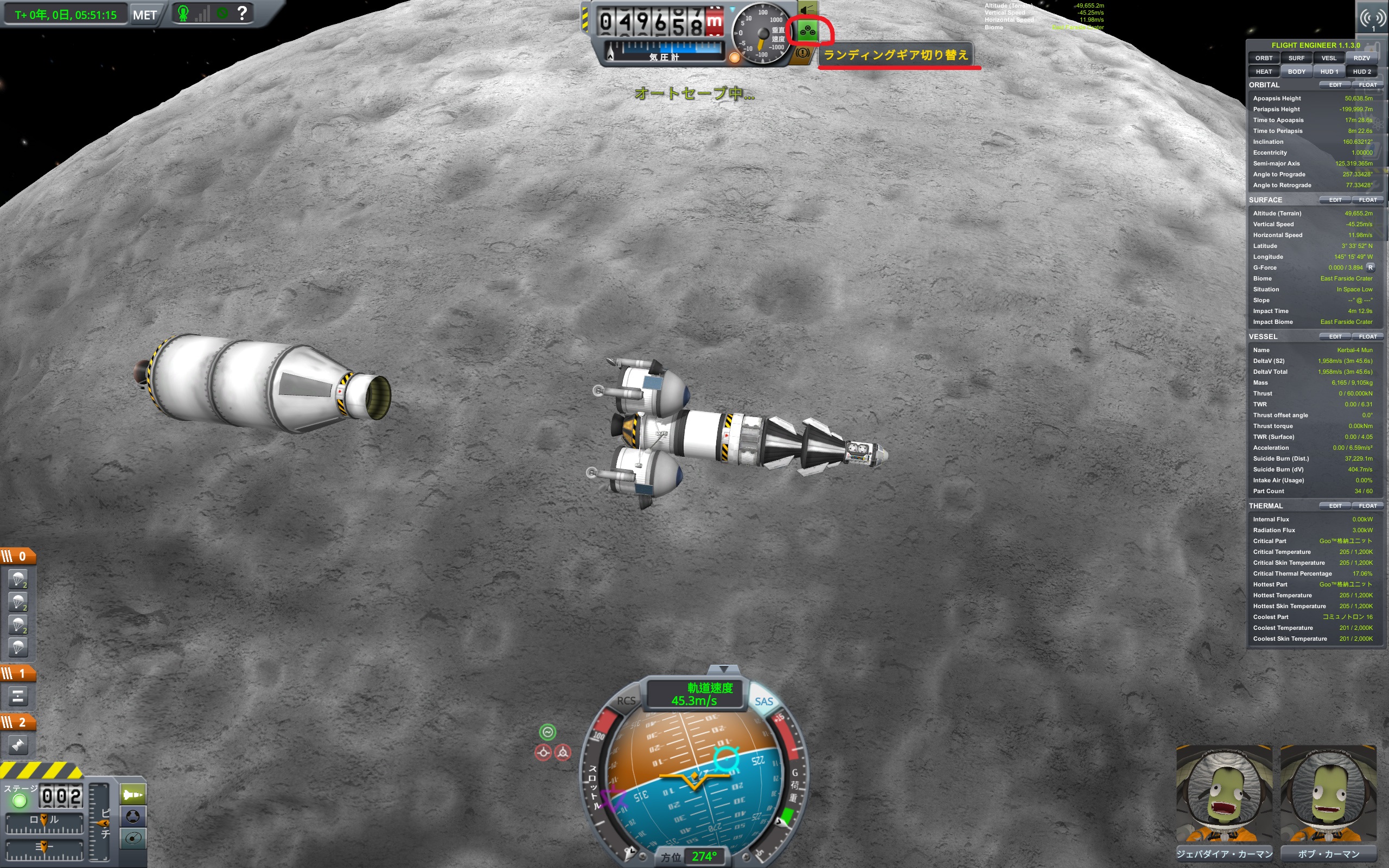
第2段切り離し、着陸脚展開
そのままにしていると機体はMunの重力に引かれて降下を始めます。降下が始まったらSASを「逆行」維持に切り替えます。
上部の高度計にて高度15000mで全力噴射を行って対地速度を100m/sにしたら1度噴射停止します。50000mから降下した場合はこの時点で高度は6000m前後となっているはずです。

一度目の全力噴射終了後 SASを逆行維持に設定している点に注目
その後「Cキー」で見れる宇宙船の内部の電波高度計か、KERの「Altitude(Terrain)」で実高度が3000mを切ったら再度全力噴射を行い、速度が10m/s 前後になったら噴射停止します。
この際、噴射のし過ぎで機体速度が3m/s 以下にならないようにします。機体速度が低下し過ぎると(0に近づくと)SASの「逆行」維持が不安定になり機体が横転したりするので気を付けて下さい。
そして、内部電波高度計とKERの「Altitude(Terrain)」で見れる高度は実際の地表と機体の高度を示しています。画面上部の高度計は海面基準の高度表記なので、着陸する最終段階に使うには不正確です。

Cキーで入れる宇宙船内部 Navballの右にあるのが電波高度計

電波高度計かKER(画面右の赤線部)で実際の高度を確認
2度目の全力噴射中
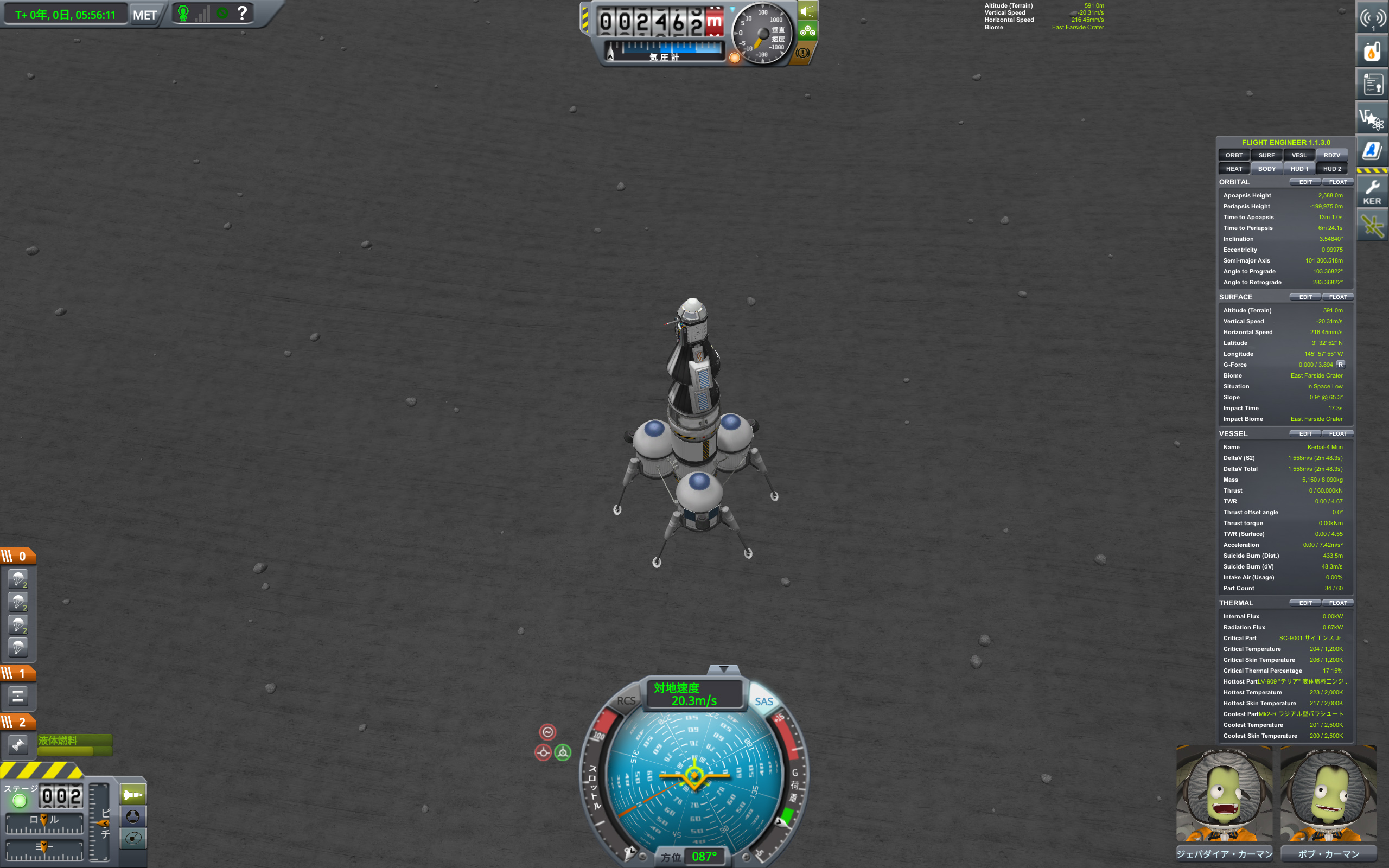
機体速度を10m/s前後まで落としたら、Tキーを2回押して(SASをOFF→ONとする)SASを安定モードにします。
前述の通り、「逆行」追尾モードのままでは速度が遅くなるとこちらの思った通りに動かず機体が不安定になるためです。SASが安定モードなら速度が0m/sになっても機体は横転しません。
後はShiftキーとCtrlキーをうまく使ってスロットルを調整して降下していきます。地面に付く際は速度が5m/s以下だと理想的です。地面に付いたらXキーですぐにエンジンを切ります。もしも運悪く着陸場所が強烈な斜面で、転倒した場合はF9キーで降下前まで戻って降下開始位置を変更します。

着陸寸前の機体
無事に着陸できたでしょうか? 着陸できたらF5でクイックセーブを行います。また、消費電力を見ながらライトも消した方がいいかも知れません。
そして科学実験を行います。
また月面でのEVAを行う事ができます。EVA中にRキーでジェットパックのオンオフを行います。操作は
W:前進 S:後退 D:右へ A:左へ
Shift:上昇 Ctrl:降下
です。現段階ではコマンドポッドまでのハシゴがサイエンスポイント不足によって開発できていないため(ロケットエンジンよりも技術的に難しいハシゴとは?)、EVA後はジェットパックでコマンドポッドまで戻ります。操作にはやや慣れが必要です。Shiftキーを小刻みに押しながらFキーでコマンドポッドに掴まる操作が特に難しいかと思います。
EVA中に旗立てと、研究開発センターをアップグレードしていれば地表サンプルの採取を行います。
また、F2キーでコンソールの表示/非表示ができます。スクリーンショット用にどうぞ。
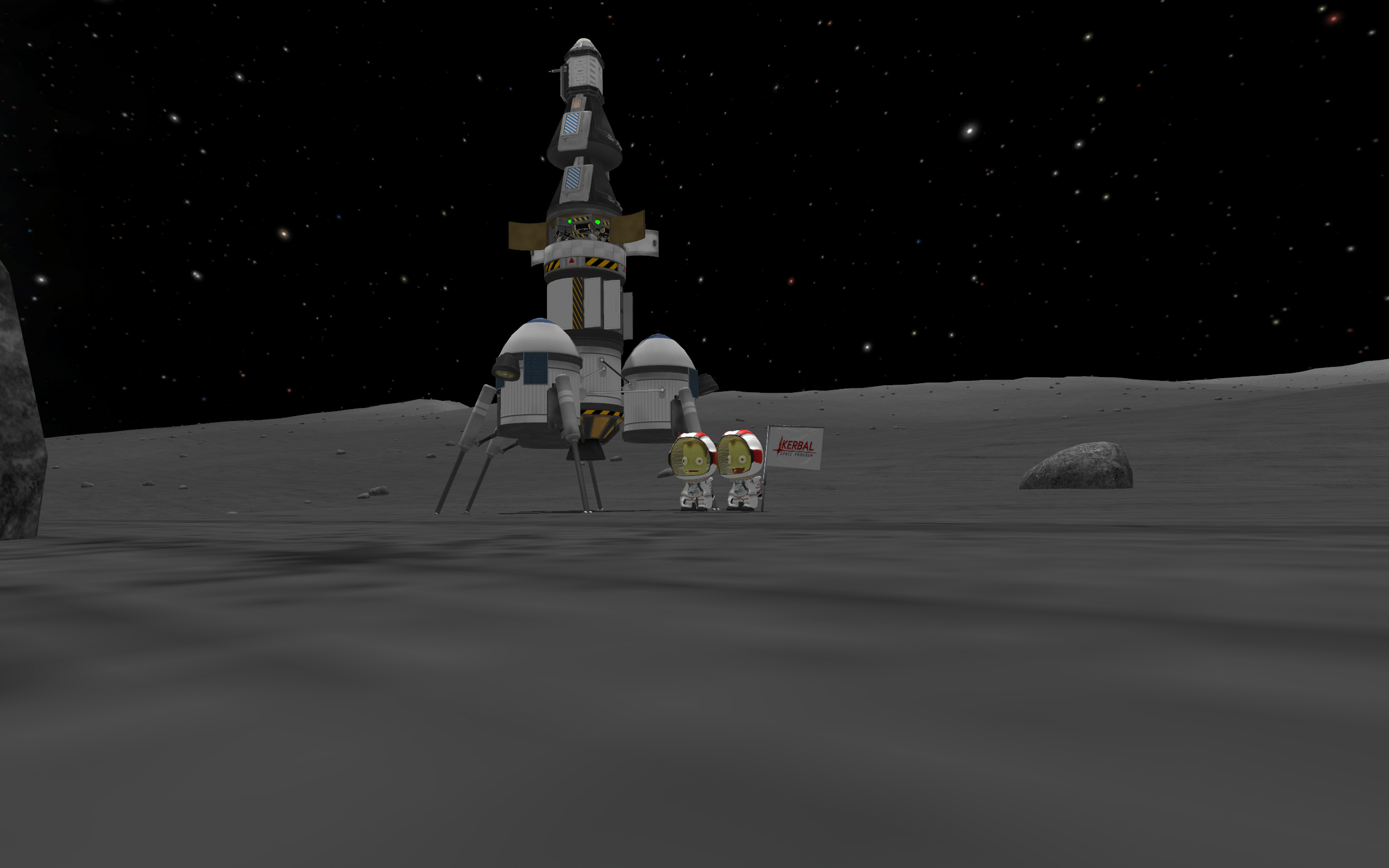
月へ着陸し記念撮影 F2キーでコンソールパネルを消している
Mun探索が終わったらクイックセーブを行ってから、Navballを見ながら東45度へ上昇してMunを離れ、Mキーで軌道マップにしてAP高度10000m以上になったら噴射停止して、APで加速マニューバを設定してMun周回軌道へ乗ります。Mun地表からMun周回軌道へはおよそ600~800m/sデルタV必要であり、Mun周回軌道からKerbin遷移軌道までにはおよそ300m/sデルタVが必要であるので、合計してMun着陸からKerbin帰還にまで全部でおよそ1000m/sほどデルタVが必要となります。

再びMun周回軌道へ
後は前章と同じく普通にKerbinへ帰るだけです。(最終噴射終了時、残りデルタVは450m/sほどでした)
お疲れ様でした。Mun着陸からの往還ができればKSPに必要な操作はほぼ習得したようなものです。この操作の応用で色々な惑星を訪れる事ができます。
この飛行では441サイエンスポイントを得ました。
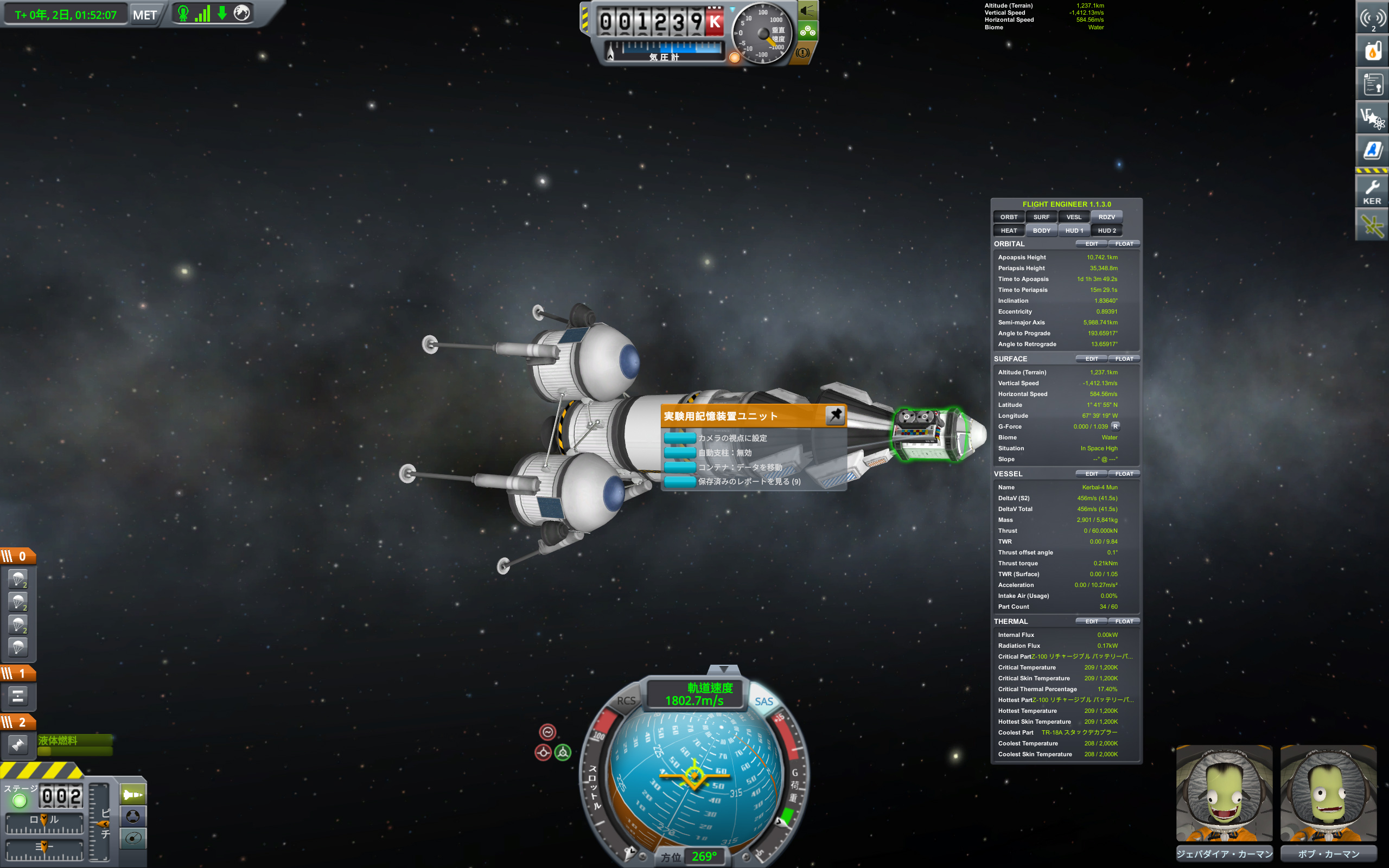
帰還前のデータの回収も忘れずに

坂道で転んでしまったが無事に帰還できた
今後どうすべきか
Munに何度か着陸を行い、「ダブルC 地震加速度計」と「グラブマックス ネガティブグラヴィオリ 重力子検知器」の開発をまず目指すのが良いと思います。特に重力子検知器の方は1つのバイオームで着陸時・低軌道時・高軌道時の3回で別々の実験を行うことができる上に、実験用記録装置ユニットにデータを保存すれば1個の検出器で何回も実験ができるので、得られるサイエンスポイントが非常に大きくなります。
そのためには2度目の研究開発センターアップグレードが必要となりますが、必要予算が大きいので各種ミッションをこなして予算を集めるのが良いと思います。
ちなみに救出ミッションはランデブーを実行できるプレイヤー技術が必要です。MechJebがあればランデブーが自動化できるので非常に楽です。
・もう1つの月、Minmusについて
Munよりもやや遠方にある第2の月Minmusへの行き方は基本的にはMunと同じですが、重力が小さい(=影響圏が狭い)上にやや軌道傾斜角があるので少しだけ到達しにくくなっています。なのでKerbin低軌道に探査船を投入した後、Minmusを右クリックして「ターゲットに指定」し、出てくるAN or DNでピンク色の三角形で示されるマニューバを調節して、Minmusと自分の軌道の傾斜角を一致させます。この操作を行ってからMinmus遷移軌道に入ると容易にMinmusの影響圏に入ることができます。
Minmus自体は月よりも低重力なので、何度も「着陸→離陸→別のバイオームに着陸」という操作はMunよりもMinmusの方がやりやすいです。中盤以降のサイエンスポイント稼ぎに最適です。
・Dunaとそれ以遠の惑星への行き方
DunaはギリギリKERだけでも行けるかもしれませんが、それ以遠の惑星へは手動で設定したマニューバで到達するのは難しいです。なので後述するMechJebを導入するのが無難かと思います。
そして一番遠い惑星Eelooに行くのは燃料量的にはそれほど難しくはないのですが、Kerbol系最難関は太陽に最も近いMohoです。周回軌道に入るために減速が大量に必要で、探査機や補給の燃料を送り込むのがとにかく難しい(≒大量の燃料を必要とする)です。
・おすすめMOD
「KSP MOD」で検索すると様々なMODが出てきますが、導入すると非常に楽しめるのが「MechJeb」と「Scansat」です。
MechJebは他惑星への遷移マニューバ設定や、打ち上げ、ランデブー、ドッキングなどを自動で行ってくれるツールであり、1度使うと手放せないくらい便利です。特に、日常作業と化した探査機や補給機の投入に便利です。
Scansatは天体の地形やバイオームをスキャンできるパーツを追加するMODです。そのパーツを付けた人工衛星を軌道傾斜角90度(北極と南極を通る極軌道)で天体に投入し、「SCAN RADER Altimetry Sensor」と「SCAN Multispetral Sensor」を付けた衛星は高度250kmの円軌道に、「SCAN SAR Altimetry Sensor」は高度750kmに投入します。やや消費電力が大きいので十分な数の太陽電池を装着します。